Q:目前车间已经不是批量生产了,开始提倡柔性生产,由过去一条线性方式变成了环形的加工。这方面你们自己的产品有什么建树?
总的来说我们现在接触到的实际需求,客户还是会首先考虑已经批量生产的产品的自动化改造。
现在其实真正急需自动化改造的大部分都是一些小批量,多品种,但是属于同类产品这样的一种生产状态。 柔性主要解决的就是实现不同产品切换的时候能实现快速切换,或者在不同工艺的时候能进行一个配置化的快速转换。
一条线性的方式变成环形的加工。这个部分应该说还不是都是这个样子的。其实是要根据每个客户自己的一个产品形态和工艺特点,为客户定制一些适合他们的生产形势。拿我们这边去年完成的一个月饼盒包装线作为例子。 这条后包装线的视频大家也可以从我们的网站上直接看到。
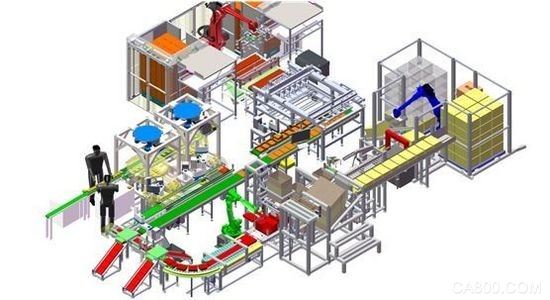
首先我解释一下这条后包装线,大家看一下图片上方有一个红色的机器人。我们可以认为这条线的起始端是从那里开始的。它的作用是把铁盒装的月饼的盒子, 从卡板中,分批放置在生产线上面。
供应商来料的方式是一个空盒的铁罐来的,所以盖子和盒子挨在一起,那我们装月饼之前需要把盖子和盒子进行分离。
另外一个在精度方面,由于前端视觉的变形。或者是由于吸盘吸取的时候的位置的差异——这个是一定会存在的——所以我们在机器人吸取完玻璃之后的放置过程中增加了我们自己开发的飞拍功能。保证我们的机器人在运动的同时可以动态辨识出玻璃在吸盘上的位置。进行位置的校准,保证玻璃可以完好无损的放置到吹盘的相应位置上面。
接下来的一段作用就是把这个盒子进行开盖。 供应商来料的方式是一个空盒的铁罐来的,所以盖子和盒子挨在一起,那我们装月饼之前需要把盖子和盒子进行分离。
但是由于包装的要求,客户是要求盖子和盒子的花纹必须要能够完整的对齐。什么意思呢就是他必须按照一定的规范进行一个配对。所以我们在开盒之后会有一个视觉的工作站来完成对各个花纹的一个调整。
下一个工作站大家可以沿着这个图顺着传送带往图片的左边来看,这两个蓝色的,有一个圆圈的这两台deta机器人完成的是对月饼的一个快速的分拣。
在这个包装过程中还有一个很重要的要求就是月饼上的花纹要和盒子和盖子的花纹保持一定的规律,要保持一致。所以在整个月饼的来料过程中,我必须要对月饼的花纹进行一个识别和排序。
接下来就是把排序好了的月饼放在盒子里面,然后再把这个盖子盖上去。 然后就是把每16盒的月饼放到箱子里面,然后完成封箱、称重、码垛。这样一个整条的一个自动化的生产线。
人呢,其实是因为这条线暂时还没有完整的连接前端的生产,所以需要两个人把前端生产好的月饼放置到这个产线上来。像我们在超市里面还能看到一些礼盒装的,纸盒装的,甚至是散装的月饼,这些是不适用的。
那么在这个过程里其实我们真正实现柔性的对象主要还是这种铁盒装的月饼。主要是不同的口味,或者包装的花纹不同,对这些我们都可以实现一个零切换的一个工作时间。 我们只要在通过软件的一个选取配置就可以自然完成整个产线的工艺转换。
实现这样一个柔性的工作站,其实在整个过程中我们对客户的工艺做了非常非常大的改造。
这里面可能就是会有点像刚才主持人提到的。原始的客户的包装流程可能就是一排,我记得他们讲的是大概28个工人。完成比如从月饼过来,我要从旁边拿盒子打开,把月饼放进去盖上盒子。扫码装箱码垛,这样一个功能。
过程中,人的作用其实除了操作之外,还有一个是检查。比如说检查月饼袋子有没有打开,盖子有没有盖好,有没有出现什么样的异常?在实现这个工作站的时候,我们首先花了非常非常多的时间重新的去学习客户的工艺。去理解哪些工艺要求是必须要实现的,哪些工艺的安排是可以被更改的?然后我们再通过我们对自动化的理解,然后依据这种对客户工艺的讨论。双方一起坐下来,商讨形成最终的自动化的解决方案。
这个里面我真正想说的一点就是柔性,首先现在的机器人技术,虽然我们用到了视觉,用到了很多信息化的东西,但是它也很难像人一样,可能只要靠一个。比如组长或班长说接下来我们要怎么怎么干了,人们很快就可以开始干。 我们现在的自动化做不到那个样子,所以柔性一定是在一个范围内进行的这种柔性 。
总之,柔性的实现,不仅仅是靠自动化的人来实施的。很多时候是先考虑工艺怎么做到柔性?然后再考虑自动化,这个柔性的工艺有没有合适的自动化的实现方式,在这种相互切磋相互交流的过程中,最终形成的方案。才是一个柔性最高、实施效率最高的一个整体的柔性工作站。
上页 1 2 3 4 下页