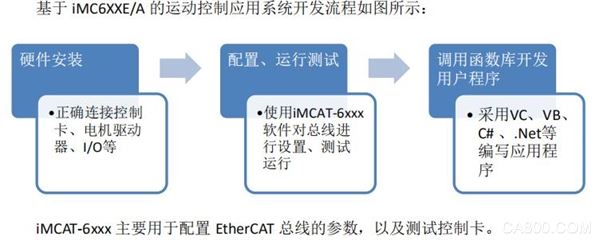
iMC6xxE 系列运动控制卡是EtherCAT总线型运动控制卡,主机通过以太网与控制卡连接,控制卡通过EtherCAT总线与伺服/步进驱动器或I/O卡连接,从而组成高性能、分布式的运动控制系统。
主要特点:
(1) 全集成运动控制核心,48位运算引擎,高精度、高速度、高可靠;
(2) Host网口用于与计算机高速通信,响应时间小至50uS;
(3) EtherCAT网口用于与伺服驱动器通信,通信周期可设置,最小500uS;
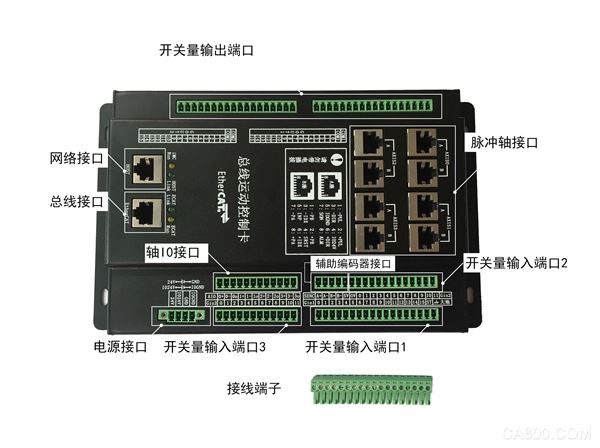
(4) 所有轴默认为EtherCAT总线轴,其中轴0~轴3可设置为脉冲轴,可用于脉冲型的伺服/步进驱动器。每轴有编码器输入接口、伺服使能、伺服复位、伺服到位、伺服报警、正/负限位开关、原点开关等接口;
(5) EtherCAT总线轴必须使用驱动器的正/负限位、原点和位置锁存输入;
(6) 1个辅编码器接口,可用于连接电子手轮等正交编码器;
(7) 32个开关量输出,52+1个开关量输入(包含脉冲轴的轴IO);
(8) 可以通过EtherCAT总线扩展I/O、模拟量卡;
(9) 支持4~100字符用户自定义加密,保护系统集成商的知识产权。
主要控制功能
(1) 点到点运动,运动过程中可任意改变目标位置和速度;
(2) 连续速度运动;
(3) 电子齿轮运动;
(4) 电子手轮运动;
(5) 插补运动:任意两轴圆弧插补、任意多轴直线插补、螺旋线(圆弧+直线)插补,支持微小线段连续插补,支持两个插补空间同时插补;
(6) 轮廓运动模式(上位机粗插补,控制卡样条拟合及精插补);
(7) 比例跟随功能:某参数的值按线性比例地跟随另一参数值的变化而变化;
(8) 龙门驱动(双电机驱动/主从跟随运动);
(9) 位置捕获锁存(需EtherCAT伺服驱动器支持);
(10) 进给倍率控制,暂停等;
(11) 反向间隙补偿。
主要指标
(1) 全集成运动控制核心,高达 48 位运算引擎,高精度、高速度、高可靠;
(2) 100M 硬协议以太网与计算机通信,最小响应时间 50us,四级校验,确保可靠,计算机最多可连 64 块控制卡(通过交换机),可通过 WiFi 路由实现无线连接;
(3) EtherCAT 总线周期可设置,最小 500us;
(4) 运动控制算法周期:1ms;
(5) 单卡最高支持 4~16 轴独立/插补运动控制(根据型号);
(6) 脉冲轴最高输出频率:6Mhz;
(7) 支持 4~32 字符用户自定义加密;