基于 PC 的位置控制
TwinCAT NC PTP 包括轴定位软件(设定值生成、位置控制)、一个带有 NC 接口的集成软 PLC、用于调试的操作程序和一个通过各种总线与轴连接的 I/O 接口。TwinCAT NC PTP 取代了传统的定位模块和 NC 控制器。
基于 PC 的 NC PTP 软件
位置控制器通常在 PC 处理器上被计算,并通过总线与驱动器和测量系统交换数据。
PC 与 PLC 功能相同,用于控制轴的运动。使用 PC 可以轻松地对几十个轴同时进行定位。
系统结构
轴在结构上可划分为 PTP 运动通道和插补运动通道。
轴结构
winCAT NC PTP 使用变量来对轴进行操控。每个轴都拥有用于编码器、驱动器和控制器的变量。可以将轴连接到 I/O 接口,并对参数进行设定。
轴功能
轴功能如下:
启动(各种模式)
停止
新目标位置和速度
恒定驱动器输出
s设定/调用实际位置
轴类型
伺服轴
高速轴/低速轴
步进电机轴
低成本型”步进电机轴
编码器轴
仿真轴
DC 驱动器
位置测量系统
位置控制器获得实际位置的方式如下:
增量编码器
绝对编码器
到驱动器的数字接口
驱动器接口
模拟
EtherCAT
SERCOS interface
SSI
Lightbus
PROFIBUS DP/MC
脉冲串
接口
连接所有常用现场总线,特别是 EtherCAT、Lightbus、SERCOS、PROFIBUS-MC 和同步 CAN
可通过一个功能块软件库将轴功能嵌入到 IEC 61131-3 PLC 系统中;功能块符合 PLCopen 标准
通过开放式标准(OPC、Beckhoff ADS)获得与 Windows NT/2000/XP/Vista/CE 程序相连的数据接口

定位
定位是通过功能强大的先进定位算法实现的,在这种算法中,生成轮廓时具有跃度限制以及对速度和加速度的预控制,以便将跟随误差降到最低。
定位功能:
控制器结构可调
P 控制器
PID 控制器
带速度预控制的 PID
带速度和加速度预控制的 PID
超调功能
调试/维护
使用联机菜单可以设定重要的轴参数,如:
目标位置,
设定速度,
加速度, 跃度,
参考速度,
控制器 Kv 系数r,
及调用一般轴功能,如:
启动,
停止/急停,
调用具有新速度的新目标位置,
特殊功能
直线耦合(电子齿轮)
距离补偿
联机主动轴/从动轴和从动轴/主动轴转换
“飞锯”(对角锯)
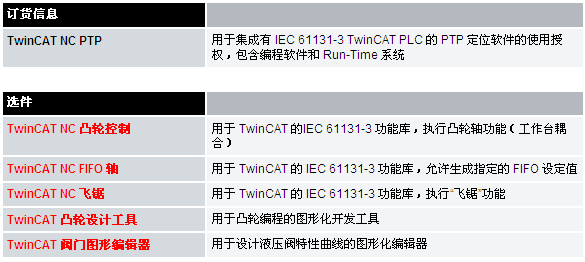
凸轮控制(由 TwinCAT 凸轮控制工具提供支持)
FIFO 轴
转换编码器/控制器
外部轴设定值发生器