5G、物联网、工业互联网等的加速建设催生了工业机器人在智慧城市、智能工厂中的广泛应用。中国的生产制造业,从流程到需求,逐渐向工业自动化方面变化和演进。国产工业机器人虽然逐渐崛起,但是其行业问题依然不少。根据GGII机构数据,2019年工业机器人营业的难点主要分布在集成商能力不足、投资回报期过长集成商能力不足、终端用户认知待提升等,其中集成商能力不足依然是占比最大的因素,达到25%。终端用户日益多样化需求的满足取决于集成商综合能力的提升,故终端用户认知待提升的问题占比20%。

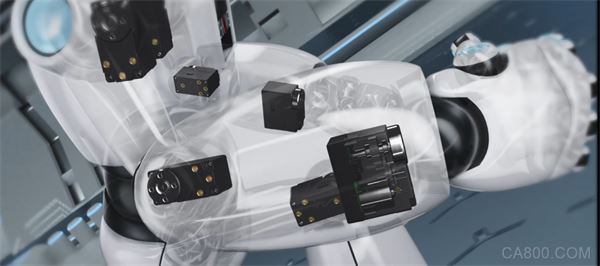
工业机器人智能化,即让机器人有感觉、有知觉,能够迅速、准确地检测及判断各种复杂的信息。随着执行与控制、自主学习与智能发育等技术进步,机器人将从预编程、示教再现控制、直接控制、遥操作等被操纵作业模式,逐渐向自主学习、自主作业方向发展。通过标准化模块组装制造工业机器人将成为趋势。当前,各个国家都在研究、开发和发展组合式机器人,这种机器人将由标准化的伺服电机、传感器、手臂、手腕与机身等工业机器人组件标准化组合件拼装制成。在工业机器人的几大关键技术上,日本均处于领先地位。目前,美国仅在3D视觉控制等方面、中国仅在涂装轨迹规划技术等方面能一起分庭抗礼。而在更为关键的谐波减速器、RV减速器、电焊钳、焊缝追踪等领域中,日本均占有优势,接近甚至超过70%的专利都属于日本。新基建带来了制造业的工业革命,推动了我国工业机器人技术创新的主力逐渐从高校和科研院所转移到企业。深圳市兆威机电股份有限公司(以下简称“兆威”)联合机器人制造厂商在微型传动系统方面和关节部件构赋能机器人实现智能化科技化。通过对机器人关节结构分析和运动原理的设想测试,对关节舵机的结构的进行了优化让关节舵机拥有更好的灵活性,可以大力矩小体积的关节电机在在狭小的空间更好的移动。将市场需求与产品研发结合起来,不断满足机器人客户的产品升级的差异化需求。
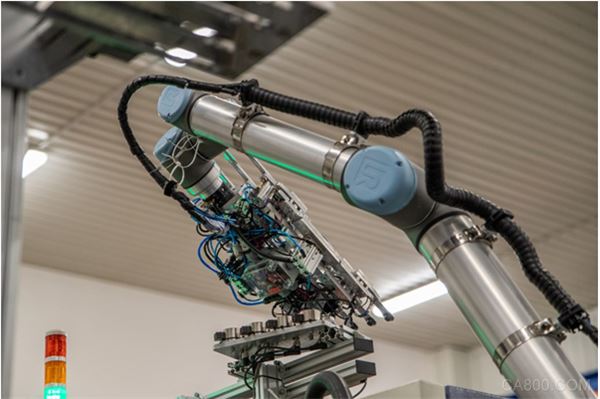
众所周知,智能机器人是一个机电一体化产品,由三大部分、六个子系统组成,三大部分分别是机械部分、传感部分、控制部分,六个子系统分别是:驱动系统、机械结构系统、控制系统、人—机交互系统、感受系统、机器人—环境交互系统。工业机器人是面向工业领域的多关节机械手或多自由度的机器人。它是自动执行工作的机器装置是靠自身动力和控制能力来实现各种功能。
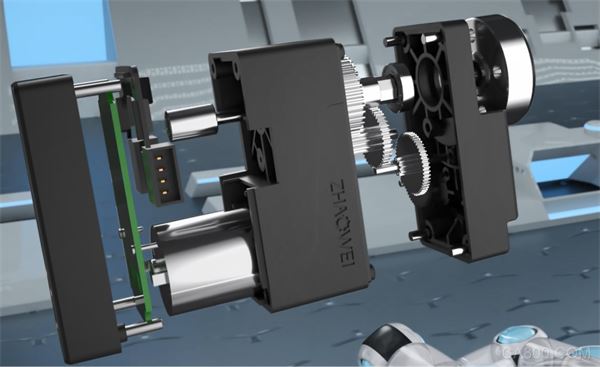
电机是智能机器人产业链上关键的一环,机器人关节更是机器手臂上应用的部件之一。随着机器人关节应用范围的广泛,机器人手臂亟需进行产品升级,这也对电机提出了更高要求。现有机器人手臂电机普遍存在规格多、批量小、零件的通用性差、成本高,质量与可靠性都不稳定的问题。一台机器人手臂能完成任务的范围受其自身的机械结构的限制,使用减速电机,对机器人手臂进行结构优化正是解决该问题的关键技术之一。

兆威联合机器人制造厂家在微型传动系统方面对机器人手臂齿轮箱电机进行结构优化,通过发展耐磨材料技术、加工工艺优化技术、润滑技术、装配技术、可靠性及寿命检测技术以及传动机理的探索,发展适合机器人手臂应用的效率、低重量减速器(齿轮箱),使其具备寿命长,工作稳定,高精密度等特点,避免了机器人手臂控制电缆的磨损和缠绕问题,更好满足六自由度机器人的传动需,大大提了智能机器人感知与识别、机构与传动、控制与交互等方面的性能。
随着一系列产业鼓励政策的颁布和实施,我国已将突破机器人关键核心技术作为科技发展的重要战略,对精密减速器发展的支持力度不断增强。同时,国内部分<a