功能概要
此功能是连接机器人和CNC,直接从CNC操作机器人,在CNC屏幕上显示机器人状态的画面。在CNC加工程序中,可以通过机器人的G代码命令进行自动操作,也可通过CNC的手动手柄进行机器人的手动操作,以及机器人手动开关的数字I/O控制。
实例:工件加工
装载/卸载动作
第1系统:系统轴
第2系统:仅控制机器人,无系统轴
1---机器人直接控制连接设定
硬件连接
参数设定
通讯检查
2---机器人直接控制设定
移动速度设置
机器人的工作速度取决于机器人的连接速度。CNC可以设定机器人的移动速度。移动速率的设置由机器人设定速度(R20465)和机器人速度命令(仅机器人命令RF和自动操作模式)设置。
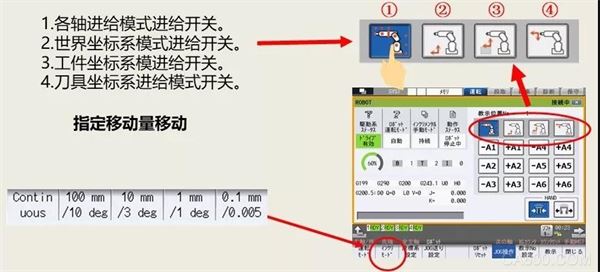
移动方式(JOG模式)
机器人在程序里的应用
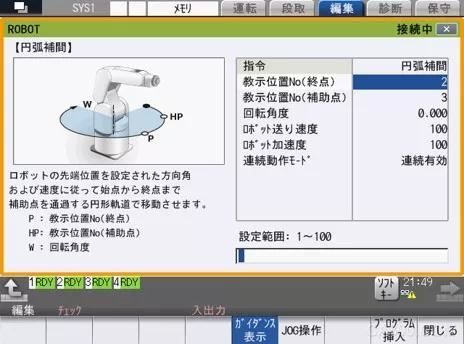
方法1:示教点在NC上操作
移动到设为示教点的位置,利用编辑画面中的示教点设置。设置成功后会在程序里显示P1 设置第二点则显示为P2。
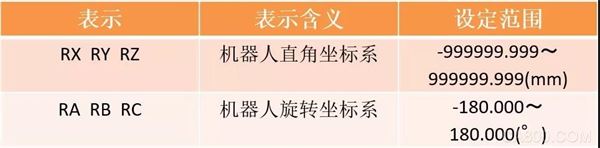
方法2:输入机器人的坐标
RX_ RY_ RZ_ RA_ RB_ RC_(轴坐标)
A1=_ A2=_ A3=_ A4=_ A5=_ A6=_(移动量)
加工时需要用到的G代码如下:
其他程序应用:
3---显示及适用
界面介绍
适用机型
4---注意事项
(1)参数#11901机器人启用装置,设备状态处于ON状态时,即使按下轴移动按钮,机器人也不移动。
(2)当按下与机器人的轴运动有关的按钮(如,轴移动按钮或手关闭按钮)时,所述菜单的反转被解除并关闭机器人。
(3)不能通过轴移动按钮来选择由机器人操作的轴移动菜单。
(4)不能同时按下诸如轴移动或手开关的两个或多个按钮来操作机器人。
(5)根据通信状态,可能需要很长的时间才能使机器人停止。如果要立即停止机器人操作的话,请按紧停来停止机器人。
(6)机器人控制器连接状态未连接的情况,不能示教。如果你在未连接状态下选择菜单(示教),它会显示操作信息“机器人控制器未连接”。