几周前,我们发布了宾夕法尼亚大学Vijay Kumar's Lab的研究成果,他们仅仅通过机载定位,就可以让四轴无人机快速通过狭小的缝隙。这个重大研究成果意味着无人机可以不再依赖外部定位系统,实现自我避障。值得一提的是,在这项研究中,无人机可以预先提供这个狭小缝隙的位置和定位信息,而不是在钻进去的时候才能做出识别。
27日,苏黎世大学机器人技术和感知研究团队的带头人Davide Falanga, Elias Mueggler, Matthias Faessler和Davide Scaramuzza教授分享了一些他们投给2017年IEEE机器人与自动化国际会议(ICRA)的研究成果。他们的研究中涉及到的无人机具备与上文提到的自动避障无人机相似的功能,但功能的实现不是都靠机身搭载物(包括感知障碍),这就是它们在自动化开发上的一些突破。
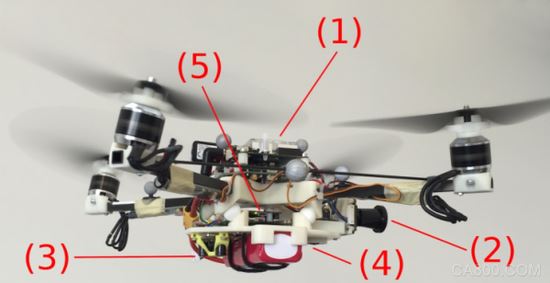
上图就是苏黎世大学研发团队在实验中用到的四轴无人机。(1)机载计算机;(2)向前的鱼眼摄像机;(3)TeraRanger One远距离感应器;(4)向下摄像机;(5)PX4自动飞手。发动机可以倾斜15度,提供三倍的偏航控制,同时集体推力只会降低3%。
为了让这些无人机在体积比它们大1.5倍,且两侧边缘距离仅有10厘米的缝隙间飞行,研究团队使用了752 x 480像素、搭载了180度视场的透镜和一个型号为PX4FMU,搭载了惯性测量装置和用机器人操作系统(ROS)的智能手机级别的单板机Odroid XU4 电脑的自动驾驶仪。在通过缝隙之后,无人机会使用向下距离传感器和摄像机保持自身稳定。所有的感应和计算过程都是在无人机机身上实现的,这意味你可以在居家环境中完成整个操作过程。
尽管整个平台是定制的,但是大部分硬件都是标准化的。其中一个引人瞩目的调整是,无人机的旋翼倾斜了15度,这在对推力没有影响的情况下,将偏航控制提高了三倍。强大的偏航控制非常重要,因为四轴无人机在接近缝隙时,角速度最高可达每秒400度。
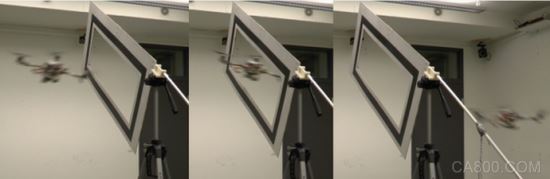
真实世界中,无人机穿过窗户的全过程是这样的:首先,无人机会通过它身上搭载的摄像机对缝隙进行定位。接着,它会计算出一个可以通过缝隙的轨道,这个轨道要让无人机离边缘越远越好,同时也要让这个缝隙被无人机的摄像机捕捉到越多越好。这个轨道基于缝隙横断物,所以无人机要能够高速移动且实现侧偏的定位,这么一来,系统就需要找到第二条轨道,它可以让无人机平稳悬停后在缝隙中穿越轨迹。如果将这两个轨道放在一起,就可以确定通过缝隙的路径了。
一旦无人机向缝隙前进,它会尽可能地保证它的摄像机瞄准缝隙的边缘,持续更新和它尝试要钻进的空间的相关状态估计,并且尽可能地重新规划轨迹。假设它顺利通过了缝隙(成功率大概是80%),最后一步就是让自己从疯狂的速度和定位中恢复过来。
这样的技能非常酷炫,但很难让人不对机器人自行完成各种感应和计算的重要性大肆渲染。当然,想要将这些技能应用到现实世界中,还是存在一些门槛的:这不仅仅是让无人机穿过窗户,更是教会它们如何在任何环境下(从热带雨林,到城市地貌,到你的卧室),可靠地快速通过各种障碍。
以下是IEEE采访Scaramuzza教授的全纪录。
1 2 下页