众为兴QC驱控一体系统在工业机器人中的应用
机器人是近些年很火的一个工业自动化的课题,中国虽然是人口大国,但也慢慢面临人口红利的优势的缺失,近些年来的用工荒可以充分说明这个转折点;所以中国应该算是近些年以及未来几年,机器人应用的主场大国;虽然作为需求大国,但谈论到机器人的自主制造,却鲜有国内制造商的身影,这其中一个重要的因素,就是配套机器人的控制系统产品的国内自主品牌还比较缺乏,这不单单是控制问题,还有关键的伺服驱动技术问题,这也是今天分享关于众为兴的QC系列驱控一体化技术在机器人领域里面的应用的初衷,通过机器人控制系统来做个抛砖引玉,谈谈驱控一体系统在机器人行业的应用优势和需求。
众为兴QC驱控一体系统让产品更“迷你”
现代工业设计理念已经不仅仅要满足功能的需求,还要满足美学的需求;就像很多年前电脑刚被发明出来的时候像个房子那么大,从产品角度上来说,功能是满足了,可是如果让你一直面对这这么庞大的东西,还能有一点人机交互的愉悦性吗?驱控一体也是如此,随着3C产业的崛起,越来越多的设备都需要做小,那么原先的电控装置就显得很别扭了,这明显不是一种技术进步。QC驱控一体系统设计理念是设计最“合适的”,然后,让自己足够的小,小到可以忽略它的存在;这不只是一种技术理念,更是一种产品理念。

众为兴QC驱控一体系统既解决体积、成本问题,又解决了高性能控制驱动要求
众为兴QC驱控一体系统作为机器人方案的典型驱控一体化技术平台,除了出众的空间体积设计外,更重要的保证功能、性能的提升,最大幅度的提升机器人的控制效能。两个根本指标解释了如何提升高性能要求:指标1,让运动控制参与或得到伺服驱动单元电流环的控制运算;指标2,让伺服驱动器能预知运动控制的规划信息。这两点在机器人领域里面尤为相关,所谓机器人的动力学控制正是需要这些关键的交互信息。而目前传统控制方案按照电流环50us的通信周期来看,就算1000M的以太网通信也解决不了这么高速的交互需求,所以QC驱控一体系统使得机器人发挥出了刚高的效能。
驱控一体化设计对机器人控制的优势:
驱控一体本质上是一种总线控制系统。但和目前主流的工业现场总线控制系统有着一些本质的区别
-
虽然驱控一体系统和现场总线系统本身都有信息交换的特点,但考虑到现场总线的外在环境,例如走线,接插件等因素,以及现场总线是串行数据总线,所以面临的障碍是容易受干扰,总线频率受限制,施工成本高等。
-
l驱控一体技术采用并行总线,由于是内部板载走线,所以普通的接插件均可以满足动辄十几二十兆的数据吞吐。
-
外围成本的对比:为了保障通讯质量,目前工业通讯对线缆的要求普遍较高,带来的配置成本居高不下,并且额外的配件例如高配的RJ45接头等都占了不小的比重,但驱控一体技术完全可以忽略连接的成本。
-
对比通信速率:驱控一体技术是点对点的并行总线,相比轮询式的串行总线的工业以太网,以8轴的控制为例,驱控一体化技术的通信速率是百兆的25倍(驱控一体是单轴20M Word/sec ,工业以太网是单轴0.78M
Word/sec,这还没算上协议开销的);
-
对比同步性能:运动控制最关键的是多轴数据同步性,工业现场以太网是通过分布式时钟补偿,各个轴的同步信号可以做到微秒级的抖动。而驱控一体化技术不单单数据总线是并行,同步时钟线也是并行的,所以同步时钟的抖动完全是靠FPGA晶振的精度和芯片电气的延时,轻轻松松达到纳秒级别。

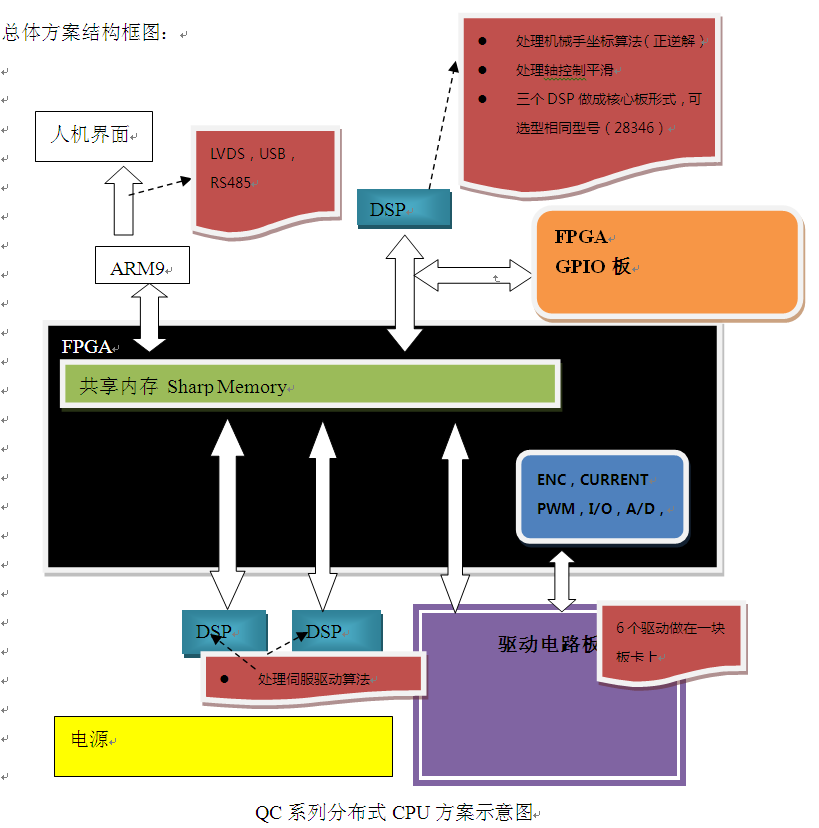
采用分布式CPU构架,更安全的实时控制
-
和传统的控制平台不同,QC驱控一体系统并没有考虑x86 的PC Base方案,这是因为虽然电脑越来越高速,但真正要做到工业现场的安全、实时要求,基于x86的平台并不能很好的保证这一点,例如一台双核的2G主频的CPU,却做不到100us的中断,1us的延迟抖动的保证;
-
QC驱控一体系统采用了分布式CPU架构,使得硬件各尽其职。打个形象的比喻,分布式CPU架构就像一个团队,每个CPU相当一个人的话,每个人都各有所长,但并不是样样精通,例如有的适合统筹(运算),有的适合商务接待(GUI)等,通过有序的对话机制来保证项目(产品)的正常运转。这种架构方案首先从实时角度上来说,一个cpu干一件事就是一种硬实时,保证了方案的可靠性;其次,可以充分利用嵌入式CPU的特性来发挥系统的高效性,如FPGA适合做高频的逻辑处理,ARM适合做人机交互,DSP适合做算法运算等,各自发挥各自的特长,从而保证整体的性能更优。
多样的电机配置选择,保障高精度控制要求
不同种类的机器人对电机的要求也不一样,如SCARA,六关节需要绝对式高精度编码器,注塑机机械手需要高速低惯量电机特性等。所以对于控制系统而言,电机的选择就显得很重要,众为兴QC驱控一体系统通过支持不同的编码器来有效解决电机选择问题,目前国内外主流都能支持,如山洋,松下,多摩川,台达等。
伺服的精度来源于编码器和位置环的响应频率,从编码器角度上来说,QC驱控一体系统通过支持不同编码器的协议,进而获取高分辨率的控制,以松下20位的绝对式伺服马达来说,控制分辨率能达到一百万分之一圈(1/1048576),精度相当高。目前已支持了有松下,尼康,多摩川,省线式等常见编码器。
-
l 单独靠编码器保证精度还不够,伺服另外一个指标是高速下的高精。这就要提到伺服的位置环刷新周期了,由于是驱控一体化的结果,所以伺服的位置环刷新周期可以简单理解为插补周期,以QC为例,最高可以做到16K,以10米/分钟的速度来算,16K插补周期的插补轴控制精度可以做到0.01mm插补精度,真正意义上的高速高精。这同样也是驱控一体化技术的优势,因为16K刷新率只有在内部高速总线上才能轻松实现。
电机品牌:


编码器品牌:


针对于机器人的特殊控制需求
众为兴QC驱控一体系统有着分体式驱动系统没有的优势,即它可以将规划信息带入伺服控制,如机器人的轴转矩随着轴臂的展开,马达的惯量会发生变化,传统伺服的速度控制就不太适应这种负载极剧变化导致控制误差的不恒定。而QC平台由于可以提前知道速度变化信息,并计算出产生的轴转矩变化,动态的送入到伺服电流环来达到误差控制。
-
众为兴QC驱控一体系统不单单满足现在的一些控制特性,还迎合了未来一些控制方向;由于可以实时获取到各个关节的扭力变化,也使得机器人一些控制算法可以发生改变,例如现在研究中的机器人动力学,柔性机器人运动控制等。
-
QC系列驱控一体系统另外一个亮点是能够对惯性进行抑制;任何东西停止下来,都会存在惯性力的作用产生偏摆,这不是速度环和位置环能调整解决的。需要在控制方法上有所革新,在驱控一体平台上,QC系列产品能够很好实现这种性能,动态中抑制住惯性,实现准停,这在一些机器人视觉方案中尤为重要。

众为兴RC驱控一体系统在各种3C机器人中的应用
目前QC系列有RC400和RC600两种产品已成功应用于四轴机器手,六轴机械手各种领域,并延伸出一些特种机械手,如五轴注塑机机械手,三轴关节机械手等,驱控一体平台可以显现出各种应用场合的适用。
案例一:水平四关节的SCARA机械手,标准节拍高达3秒,可配合视觉用于分拣,码垛,锁螺丝,点胶等应用场合。

案例二:注塑机五轴上下料机械手,直驱式的安装,能够消除长臂支杆带来的抖动。


结束语
本文虽然以机器人作为讨论对象来抛出控制系统的需求,进而讨论众为兴QC驱控一体系统的技术趋势,事实上很多的机电一体化产品都有着共性的需求,如注塑机机械手,冲压机械手等等;机器人是个典型,目前国内也有很多科研和商业公司开展了研究,作为运动控制解决方案商深圳众为兴,QC系列驱控一体化控制系统是从最终产品角度上来考虑运动控制产品的定位和设计,其革新的设计方案或许能对一些有意愿加入这个自动化行业的设计者提供一种思路。
