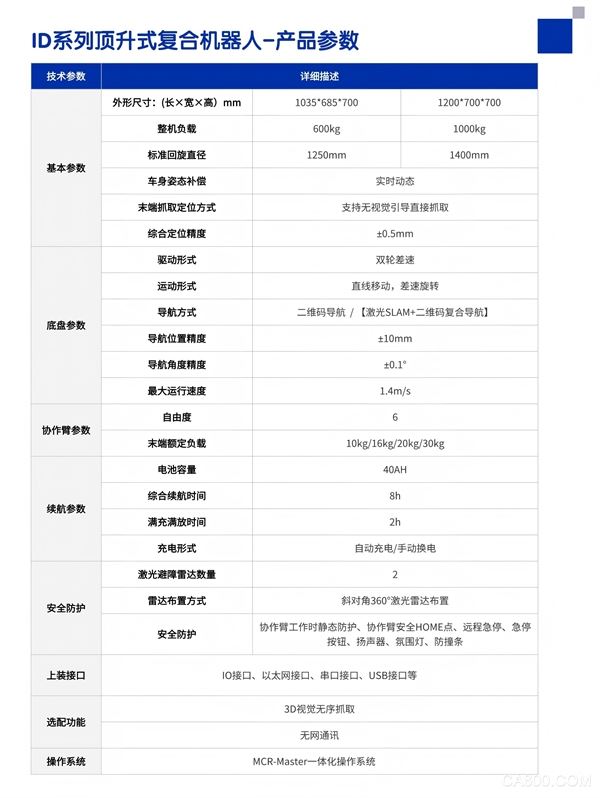
经世智能ID系列顶升式复合机器人,外型接近I型,在I型的基础上增加了顶升功能。
经世智能复合机器人产品使用了自主研发的复合机器人一体化控制系统和复合机器人车身姿态动态补偿技术,有效保障抓取的精度和稳定性,抓取综合重复定位精度达到行业领先的±0.5mm。
创新点1:复合机器人一体化控制系统
一体化控制系统包含复合机器人专用一体化控制器、复合机器人统一姿态模型、车身姿态动态补偿系统、综合管理调度平台等单元模块,创造性地将视觉、底盘、协作臂三大控制器进行算法融合统一。 相比常规的复合机器人系统集成方案,一体化控制系统在设备占用空间、设备整体功耗、实施性等方面更具优势,在效率和实用性上更胜一筹,可高效稳定地应对复杂作业环境。
创新点2:车身姿态动态补偿技术
在机器人一体化控制器中构建了复合机器人统一姿态模型,在实现逻辑运算的同时完成统一姿态运算,具备自动感知周边环境姿态及车身整体姿态变化的能力,在计算闭环后直接输出末端抓取的精确位置与姿态,对车身进行实时动态调整与校准,从而确保复合机器人在执行抓取任务时的稳定性和精准性。有了车身姿态动态补偿系统,可以保障机器人(即使在复杂工作环境下也能)一抓一个准,末端抓取更稳定、更精准。
创新点3:复合机器人一体化操作系统
经世智能针对复合机器人的交付难题,自主研发了MCR-Master复合机器人一体化操作系统,将复合机器人的“脚”(底盘)、“手”(协作机器人)、“眼”(视觉相机)统一到一个平台进行一体化控制与调试,提高调试效率,缩短调试周期。无代码、零编程,内置强大的逻辑编辑器功能,以拖拽积木块的方式即可完成编程逻辑,触屏式操作,方便快捷,无经验人员也能快速上手。兼容PC端、移动端、平板端,支持远程调试与多终端协同控制。
集成机器人管理、地图管理、站点管理、导航管理、综合调度以及数据监控等多项功能。得益于一体化控制底层控制算法的直接通讯功能,MCR-Master复合机器人操作系统操作简便,易于上手,且具备强大的二次开发能力,能够降低复合机器人系统的交付成本,缩短实施与落地的时间,在移动复合机器人市场上展现出强大的竞争优势。