MasterAlign视觉对位系统通讯日志

MasterAlign_LTW(下文中简称为MA_LTW)为双翌自主研发的视觉对位系统应用软件,软件中的通讯日志可方便我们进行整个通讯流程的接收和查询流程进行分析,详情见文档所示:
1、如何打开MA视觉对位系统通讯日志
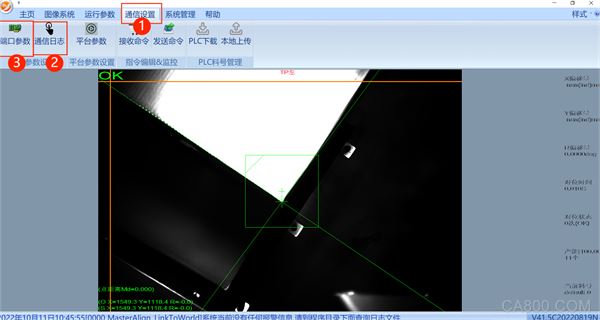
Fig.1 打开通讯日志方法
点击图像中①进入到通讯设置界面,点击②③,分别打开通讯日志和端口参数界面

Fig.2 通讯日志和端口参数
上图中①是通讯日志,②是端口参数
2、如何通过MA视觉对位系统通讯日志查看流程运行时间

Fig.3 通讯日志界面
通讯日志:
①是一个流程的运行时间,由机器人发信号到视觉返回信号为一个通讯流程,时间是由时、分、秒、毫秒组成,例如图中14/24/34/635 就是14时24分34秒635毫秒
②黄色是接收,机器人发过给视觉的数据和信号
③绿色是发送,视觉返回给机器人的数据和信号
④自动保存通讯日志里面的所以数据,生成数据在文件夹里面的“SYCommunicateLogFile”文件夹里面,通过存储的日志文件可以看出发送的数据准不准确
3、MA_LTW通讯方式
MA_LTW软件广泛应用于工业应用现场精密对位和精密装配场合中,常用的通讯方式如下所示:

MA_LTW配合过的PLC和机械手通讯见网站链接所示:
https://www.shuangyi-tech.com/news_99.html
3.1 TCPIPServer
这是TCP网口连接通讯,需要设置IP,视觉软件做服务器

端口参数:①可以看到连接、断开、接收的数据
②可以确认通讯是否保持连接,连接通讯的个数
起始符:通讯数据的开始标示
类型:STX是正文开始
结束符:通讯数据的结束标示
类型:CR是回车
CR+LF是回车+换行
ETX是正文结束
LF是换行
ETX+CR是正文结束+换行
更改端口、参数后需要点击右下角“设置/保存参数”后再进行操作
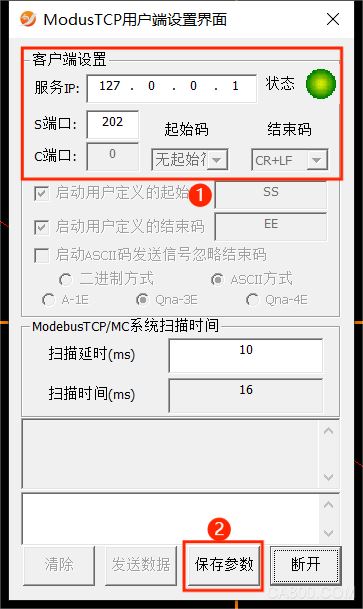
3.2 TCPIPClient
TCP网口连接通讯,需要设置IP,视觉软件做客户端

端口参数:②可以看到接收和发送的数据
③是手动发送给服务器的数据
S端口:服务器端口
C端口:本地端口
起始符:通讯数据的开始标示
类型:STX是正文开始
结束符:通讯数据的结束标示
类型:CR是回车
CR+LF是回车+换行
ETX是正文结束
LF是换行
ETX+CR是正文结束+换行
更改IP/端口、数据后需要点击下面的“保存参数”后再进行操作
3.3 ModbusRTU
Modbus串口通讯

点击①后打开端口参数②和接收命令③

①是串口号,要与PLC串口对上,②的设置要与PLC端口一致,③仅是代表端口是否打开,即使亮绿灯也不代表和PLC连接正常,修改①和②后要点击右下角“设置/保存参数”保存参数

在①中可以看到PLC发送过来的数据
3.4 ModbusTCP
Modbus TCP通讯

点击①后打开端口参数②和接收命令③
连接通讯
在①里面修改IP和端口号,修改后须在②点击“保存参数”
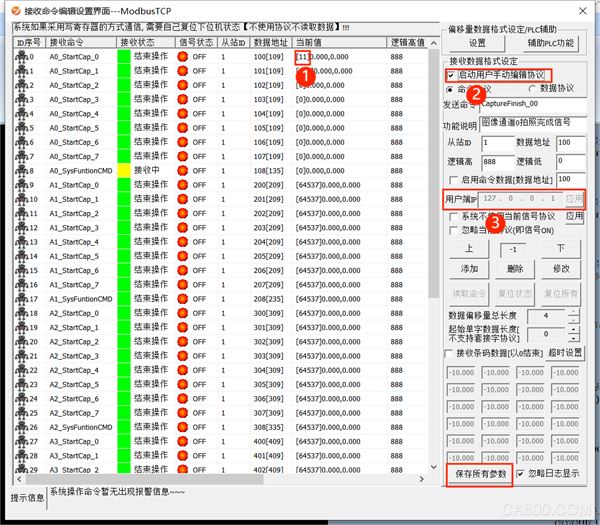
①是PLC发送过来,视觉接收到的数据,点击②之后才能进行编辑右边的数据,要保证③IP地址和PLC的地址一样,修改后点击下面“保存所有参数”保存,然后点击②才可以退出