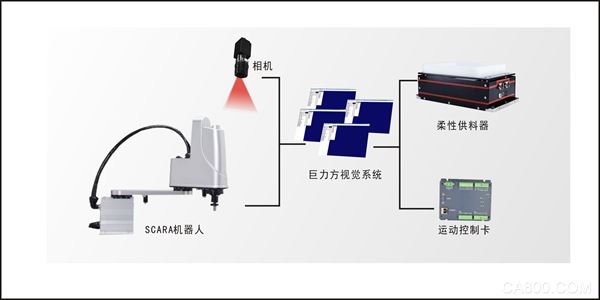
柔性振动盘视觉上料系统,引用视觉定位系统和机器人抓取技术的全新一代工业自动化上料系统,迎合了当前 工业自动化生产中客户小批量、多品种的快速切换生产需要,取代大量人工进行的诸如摆盘等单调重复性作业岗位。 基于机器视觉与机器人运动控制的结合,解决了传统方案,实现集机器视觉+机器人运动控制于一体,简化成同一 台内部通讯,提高了处理速度,达到操作使用方便、上料更简单的效果。

应用领域: - 汽车 - 3C电子 - 5G通讯半导体 - 医疗生物 - 珠宝、钟表等行业等等...

产品特点
精 准 定 位
高精度、高效率、高稳定的 视觉测量算法,能准确定位振动盘零件位置

通 用 性
视觉拍照定位,机器人抓取,适用各种 小型零部件散料排列上料

简单易操作
易于理解、快速掌握的友好界面。流程、界面均可任意扩展
一 体 化 集 成
机器视觉、机械手与柔性供料器集成一体 化,视觉直接控制机器人运行,提高处理速 度 易于理解、快速掌握的友好界面。流 程、界面均可任意扩展视觉控制多吸头取料,实现快速运行, 提高生产效率
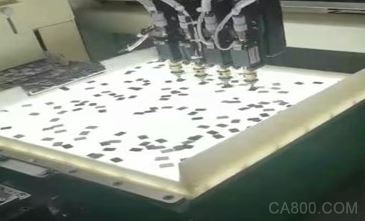
多吸嘴取料提高效率
视觉控制多吸头取料,实现快速运行,提高生产效率
1-供料器上料
人工加料至储料仓,储料仓振动补料至柔性供料器料盘。

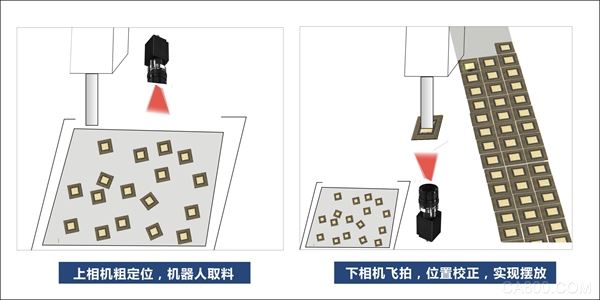
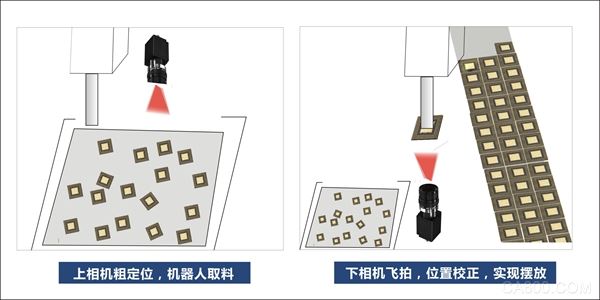
2-上相机粗定位
零件在柔性供料器的料盘快速振散后,相机拍照,摄取料盘窗内合适的零件形状位置信息,将坐标数据发送给机器人。
3-机械手取料
机器人基于视觉图像处理器发送的坐标位置数据,移动至柔性料盘表面抓取零件。

4-下相机飞拍精定位-摆盘
机器人抓取零件移动,下相机飞拍,位置校正,实现摆盘或组装。
案例介绍
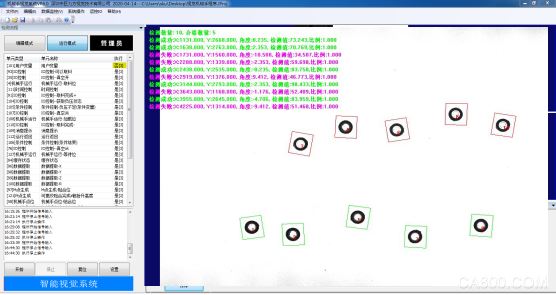
◇ 系统功能:
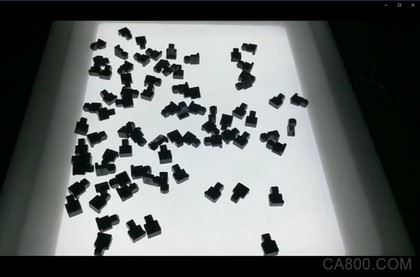
产品在振动盘中振动,振动停止后,相机进行拍照,通过视觉图像处理器处理后,识别出产品的正反,产品方向为正,运动机构取走产品,产品方向为反,视为NG,不抓取产品,等待振动盘下一次振动。
相机:1个 像素2000W
镜头:1个
机械臂:四轴YAMAHA机械臂