全自动视觉对位磁芯研磨机用于变压器、电源模块等产品在PCB板点胶后的磁芯研磨糅合的工艺,使胶水均匀分布在磁芯表面精确控制磁芯气隙≤12mm。本设备适用于EI系列、RM系列、ER系列、PQ系列等集成磁芯的研磨。
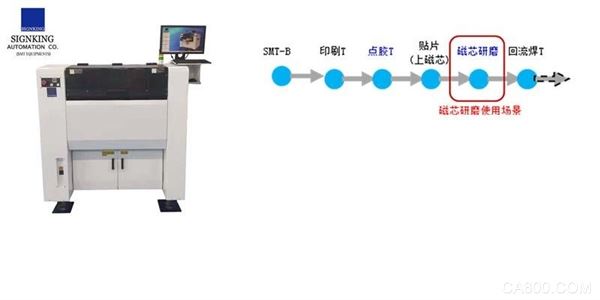
磁芯研磨工艺路线
产品特点:
高速直线电机,进口伺服系统
采用磁悬浮高速直线电机,全直线驱动主轴。
X、Y轴直线电机使用进口伺服系统驱动,直线编码器做全闭环控制,表现更高研磨速度及精度。
高精度高级相机
2套高清相机,用于元器件的识别和定位。使用快速不停顿拍摄方法,在对磁芯拍照识别过程中实现高速飞行对中定位,配备光学系统有效MARK点、磁芯位置。CCD辅助编程,实现MARK点自动补偿校准定位功能,图像质量好,图像清晰。
双工作悬臂设计
升降主轴均采用直线电机直线驱动进行X/Y轴的平移运动,Z轴的旋转运动,两个悬臂互不影响,研磨工位可独立工作。
进口光栅尺
直线光栅尺用于X、Y轴做全闭环反馈控制。
采用高优质的PU材料制造出耐油、高弹性及抗老化胶封。合适的闭合角度和适中的软硬度,保证密封性能和较少的磨擦力。
读数头滑动部分结构采用已被验证为可靠耐用的轴承设计,保证光学感应系统能长期稳定地在光栅尺上畅顺滑行。
双研磨头模块化设计
研磨头模组可根据磁芯规格自动或手动更换.并进行X/Y轴的平移运动,Z轴的旋转运动,可进行上、下、左、右、前、后等任意方向做精确 研磨动作;
可通过研磨头库参数设置研磨头的位置、速度、高度等参数。
运输带:
采用双轨单通道三段运输方式实现双工位同时作业,PCB板宽度可自动调整,只需在控制软件界面中设置PCB板数据。
|
技术参数
|
|
设备基本规格
|
设备功能
|
EI、RM、ER、PQ等集成磁芯气隙点胶后的研磨糅合
|
|
研磨工位
|
1、2个工作悬臂;
2、2个悬臂互不影响,可独立工作;
3、2个研磨工位间轨道独立
|
|
单臂工作范围
|
1、磁芯尺寸长*宽*高:32.7*23.4*10.4mm~7.52*2.9*4.6mm
2、PCB尺寸长*宽*高不超过250*250*100mm
3、工装/工作行程满足长*宽*高不小于350*350*150mm
|
|
光学系统
|
配置CCD,CCD辅助编程,能识别MARK点、磁芯位置,实现MARK点自动补偿校准定位功能,图像质量好,图像清晰,分辨率≧100万像素。
|
|
Cycle Time
|
≦4s/pcs磁芯,一个动作循环是指研磨1个的时间,即≧900pcs磁芯/h产量。
|
|
研磨头重复定位精度
|
±0.05mm
|
|
轨道最大夹持PCB厚度
|
Max=5mm
|
|
磁芯研磨头模组
|
禁布区
|
0mm,即研磨头的外形尺寸小于磁芯外形尺寸
|
|
研磨后的磁芯位置的检测
|
磁芯研磨后,光学系统检测是否对齐。
|
|
研磨后回位
|
磁芯研磨后可以归零位,精度±0.5mm
|
|
研磨按压力可调,过压保护
|
1、研磨力范围0.1~100N,分辨率≦0.1N;
2、研磨时,可保持恒力(±1N)进行研磨;
3、研磨头上压力显示装置出现过压时报警提示;
|
|
研磨路径
|
1、可以进行X/Y轴的平移运动,Z轴的旋转运动;
2、研磨方向:上、下、左、右、前、后等任意方向;
2、研磨按压力、研磨路径和研磨次数可由程序控制;
|
|
研磨点位,研磨次数,研磨路径、研磨速度可配置可控制
|
1、研磨点位可根据导入的点位文件配合CCD自动寻找,CCD识别精度≦0.02mm;(现有的用激光检测)
2、磁芯研磨速度需要可以任意设定;
3、设备上有统一的标准机械定位\电\气接口;
|
|
快换
|
1、吸取研磨头模组可快速更换;
2、操作步骤简单;
|
|
顶针机构可调整
|
在按压研磨时可很好顶住PCB,并且顶针位置可在80×80~260×260调整
|
|
输送线工作运载稳定性
|
1、输送线需连运载最大重量为5kg的工件且运行平稳;
2、运行停止定位时无明显抖动、震动现象,不得影响工件内器件的位置稳定性
|