1.概述
本方案主要用于门式结构或桥式结构双轴平移时,纠正因双轴速度不同步引起位移偏差而导致横梁平衡角大于容错角致使机械卡住。可用于门式起重机/桥式起重机,立体停车架等平移同步上的应用。
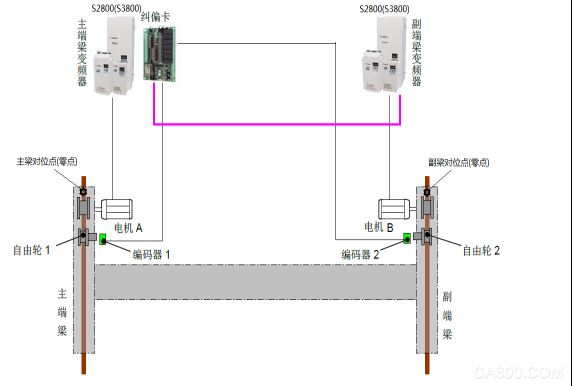
2.系统组成
3.功能描述
3.1对位点
对位点用于设置主梁与副梁参照的绝对位置,消除系统长时间运行时所产生的累积误差。
3.2位置检测
主梁与副梁上分别安装有开集电极的正交编码器。运行中远离对位点的方向为正方向(增计数),接近对位点的方向为负方向(减计数)。
3.3同步
根据检测到的主梁与副梁所得到的位置偏差,并且根据用户所设参数,可执行不同步,自动同步,超偏差停车等功能
3.4精度
本装置上两组正交编码器输入计数频率可达50K。在实际应用中,控制的精度与编码器线数及自由轮半径大小相关。正比于编码器线数,反比于自由轮半径。要求两编码器线数一致,自由轮半径一致。
3.5故障
超偏差故障,本装置在变频启动后,前3S不对超偏差进行检测。3S后当前两主梁与副梁的偏差大于所设定的最大偏差时。关闭输出,并给变频器故障信号。
4.硬件连接图
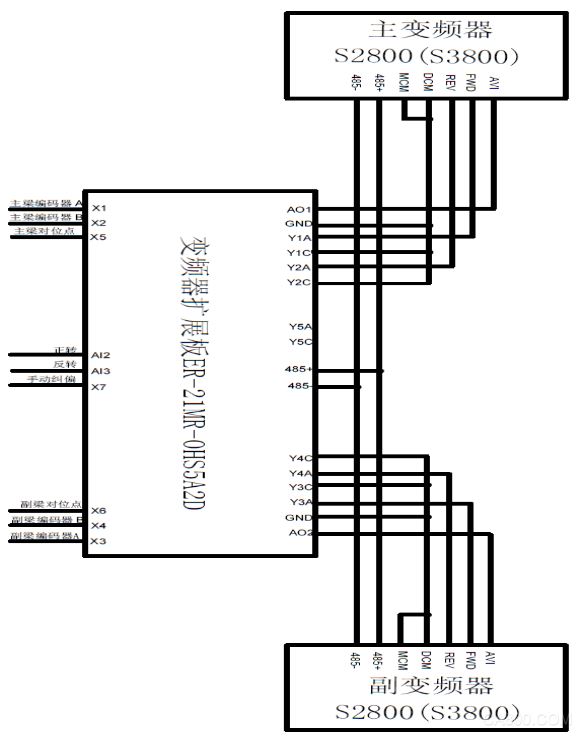
5.端点定义

6.扩展板参数
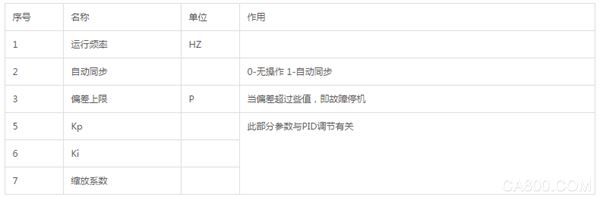
7.变频器参数
可根据实际应用进行相关参数调整。
