一. 器材
1. FT1A-M14KA-S 可编程控制器 x1
2. FC6A-PJ2CP 温度模块 x1
3. K 型热电偶 x1
4. Omron G3NB-210B-1 型 SSR 继电器 x1(24V 输入,AC 24~220V 10A 输出)
5. 开关电源 x1(含 24V 输出)
6. 导线若干
二. 接线图
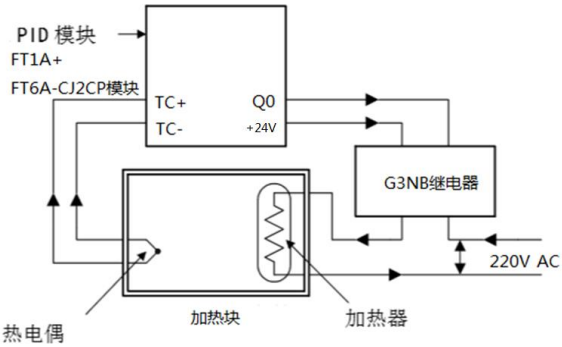
三. 原理
PLC 的输出点 Q0 接入继电器的-24V 接点。通过 PID 程序控制 Q0 的通断从而控制继电器的通断,即加热器的起停,以此来简单控制加热达到 PID 控制的效果。
实验样例程序:
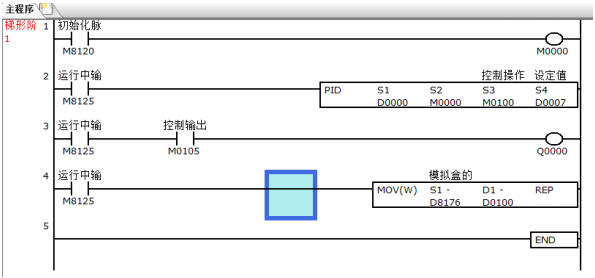
其中 M8120 为特殊内部继电器,效果为每次上电后的第一个扫描周期内导通。M8125 也为特殊内部继电器,效果为运行时始终导通。
M0 为在 PID 指令中指定的 S2 位,每次导通都会将设定的 PID 各项参数值写入指定的寄存器和继电器内。
M105 为 PID 指令中指定的 S3 位+5 地址,这个位的作用是按照输出量来打开/关闭。
四. PID 指令介绍以及 PID 参数设置方法。

相关指令可以参考手册中 PID 相关部分的介绍。(指令-高级指令-PID 指令)S1~S4 的寄存器和继电器均为自己指定,只要不与程序中其他地址冲突即可,并且不可以使用特殊继电器和特殊寄存器。
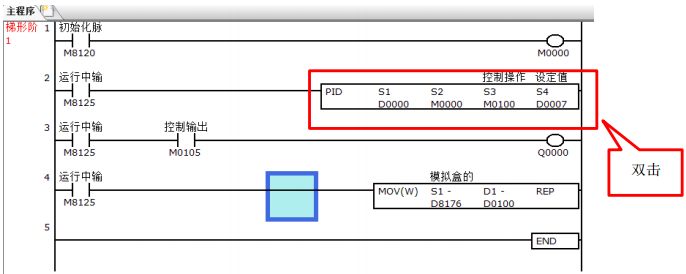
五. PID 参数设置方法
PID 指令输入完成之后,可以双击该条 PID 指令框,选择输入选项卡
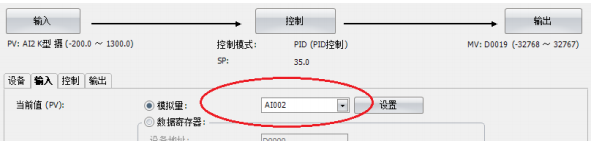
注:FT1A自带 2路模拟量输入,所使用的 K型热电偶信号输入需要使用扩展模块 FC6A-PJ2CP。因此在模拟量这项选择 AI002( AI000 和 AI001 预留给 PLC 自带模拟量通道)
点击设置按钮

进入设置界面后选择所使用的扩展模块型号
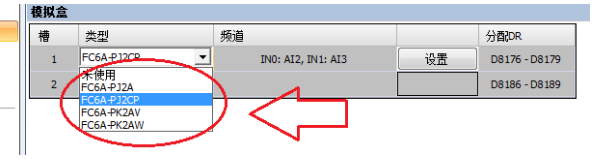
然后点击设置

在动作模式中选择所使用的热电偶类型

同时在右侧的数据类型中可以选择寄存器中显示数据的格式

模块设定完成后,重新回到梯形图双击 PID 指令进入设定界面,点击控制按钮

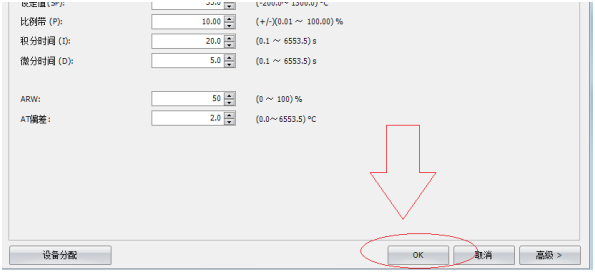
打开后会出现 PID 各项参数设定的界面(如下图)

设置完成后点击 OK 按钮完成并应用设置的参数
如果就此写入程序并执行,那么系统会按照所给定的 PID 参数进行 PID 控制。
注: P、 I、 D 三项参数对 PID 控制起着决定性的作用,这三个值得变化将会对 PID 控制及其整定曲线有着显著影响。
简单来说, P 比例参数影响的是超调量, P 越大超调量也会越大。I 积分参数影响的是超调恢复的时间, I 越大超调恢复时间越长。D 微分参数影响的是整定时的振荡频率, D 越大振荡越频繁。
六.自整定功能
由于在实际的项目中,不一定有合适的经验值供现场人员使用,因此可以利用 PID 功能中的自整定功能,先得出一个大概的可以使用的值,然后在后续生产中根据实际情况继续修正或者继续使用这些值。FT1A 的 PID 自整定功能,具体使用方法如下:
1. 写入程序后上电,使系统开始运行
2. 点击联机->监控,或者直接点击标题拦上面的监控按钮.(如下图)
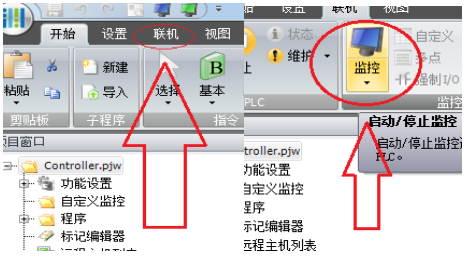
或者直接点击

3. 进入监控状态后,点击右侧的 PID 监控按钮(下图)
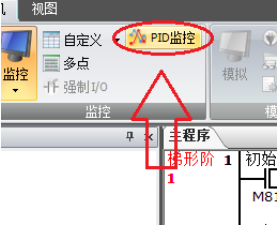
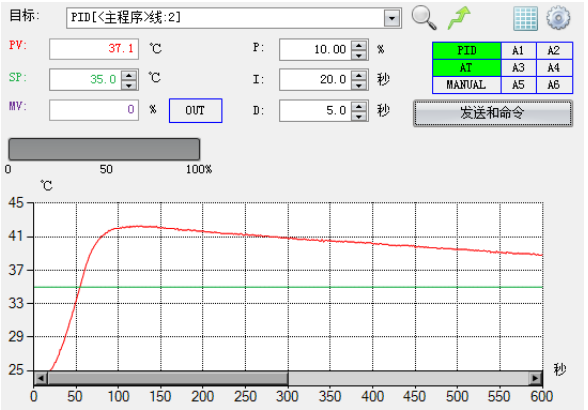
点击后进入 PID 监控画面(下图)

监控画面中的 PV 值和 PID 参数即为之前在 PID 指令中所设置的参数。接着点击[发送和命令]选项,选择[AT]->[执行 AT],就可以开启自整定动作(开启后 AT灯会点亮,如下图)

4. 自整定完成
一般在经历 1-2 个振荡周期后,系统会完成自整定,AT 灯自动熄灭,并且新的 PID 参数会显示在表中(与设定值不同的 PID 值),之后系统会以这个值进行自动 PID,而非最初在 PID 指令中所设置的参数。振荡曲线可以在下方的图表中观察,标尺大小也可以自行设置。
自整定中:
自整定完成:

可以看到当自整定完成时 AT 灯是熄灭的,另外完成后的 PID 参数也与之前手动设定的值大不相同。
至此可以了解到系统的自整定完成,之后的整定动作都会根据这个参数进行。
七. 结论
通过本实验可以得知通过外部的模拟量模块和 FT1A 本身具有的 PID 指令和相关功能,可以实现通过开关量的控制来实现 PID 控制。
由于使用的热电偶模块没有有效的降温手段,所以在实验过程比较耗时,系统绘制的PID 曲线也与普通的振荡曲线有所区别,整定时间较长,需要注意。
