1.前 言
工业机器人自60年代初问世以来,经过了近50年的发展,已广泛应用于工业领域,成为汽车制造业生产自动化中主要的机电一体化设备,而应用最多的则是焊接机器人。应用机器人的主要目的在于削减生产人员编制、提高劳动生产率、降低劳动强度及提高产品质量。机器人与传统的机器相比,具有两个主要优点: 容易实现生产过程的完全自动化;对生产设备的高度适应能力。
而今,机器人用户对工业机器人生产提出了更高的要求——在完成生产纲领的情况下,提高单位面积的产值,即,使用更少的生产布局和人员完成生产。安川首钢机器人有限公司(以下简称YSR)根据客户的这一需求,经过几年的探索和实践,开发出了MINI型焊接机器人工作站(以下简称mini-cell)。
2.MINI型焊接机器人工作站介绍
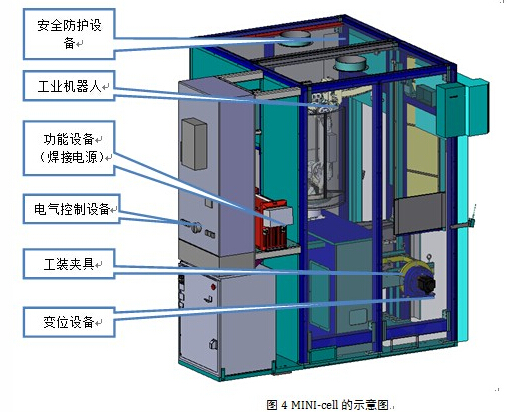
焊接机器人在工业机器人应用领域占有最大的份额。由于汽车制造业对许多构件的焊接精度和速度等指标提出越来越高的要求,一般工人已难以胜任这一工作;此外,焊接时的火花及烟雾等,对人体造成危害,因此,焊接过程的完全自动化已成为重要的研究课题,其中,最为重要的就是要应用焊接机器人。机器人焊接工作站一般有这几部分组成,如下图:
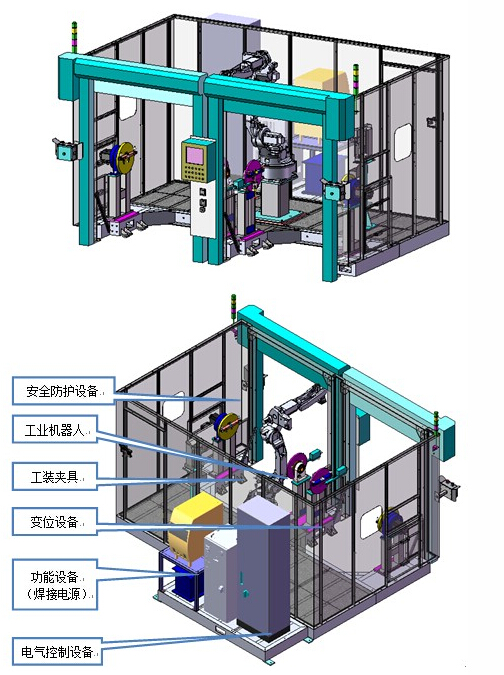
1)工业机器人——焊枪或作业工具的载体,实现弧焊作业时所需要的焊接位置、焊接姿态、焊接轨迹。
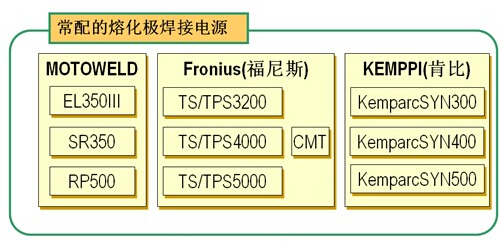
2)功能设备¬——各种焊接电源及焊接电源相关的所有配套设备,是体现系统功能的设备。根据工件对焊接工艺的要求及用户对生产厂家及焊接电源规格的喜好,使得焊接电源存在多样性的选择。一般推荐如下:
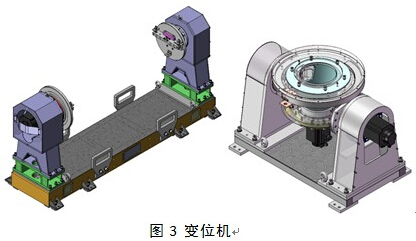
3)辅助变位设备¬——为了实现焊接所要求的最佳焊枪姿态和焊枪位置,对机器人或夹具进行变位的设备。在mini-cell中,由于工件的焊接工艺及空间限制,一般情况下使用固定台或单轴翻转变位机及双轴变位机,如下图:
4)工装夹具¬——实现工件定位的关键设备。
5)电气控制设备——系统运行的控制中心,是系统正常运行的保障。焊接工作站的电气系统基本可划分为以下几个部分: PLC控制器、主操作盘、机器人控制系统、夹具、安全附属系统。
6)系统安全及底座——安全栏、弧光防护、设备安全及人员安全的保障设备。
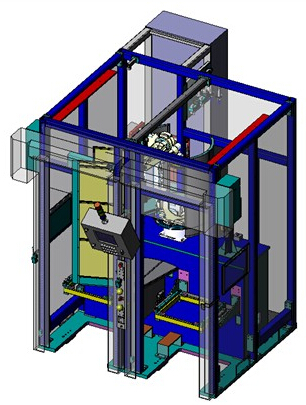
Mini-cell与一般焊接工作站外观通过图表1与图表3可直观的进行对比,其特点如下:
1)Mini-cell采用MOTOMAN-MA1400机器人,由于其线缆内藏和R轴的特殊设计,能够在更小的范围内实现更多的焊接姿态,因而是mini-cell最优的选择。
2)Mini-cell主要应用于汽车零部件中小型零件的焊接,适用焊接零件尺寸范围为500 X 500 mm以内。
3)Mini-cell的安全栏布局紧凑,采用全封闭式防护。为了防止弧光,在机器人S轴增加挡圈式弧光防护栏。
3 MINI型焊接机器人工作站的应用经验
Mini-cell的开发及应用已有几年时间,根据实际应用,以下一些经验供大家一起研究。
3.1 mini-cell的使用,必须满足安全要求
焊接机器人能够代替人在危险、有害的恶劣环境中作业,同时又带来了另一种潜在的危险,即机器人伤人事故。为此,在焊接机器人在线运行时,绝对不能有人进入其运动安全范围所在区域,并且其运动区域内应该保证无干涉,这是焊接机器人安全管理的最为重要的一条原则。对于mini-cell由于空间更为紧凑,在机器人运动区域设计布置方面尤为重要。例如我们正在使用的安全防护措施:
(1)mini-cell周边设备安装全封闭安全防护栏,以防止有人进入危险区域造成意外伤害。作为双工位不间断生产的mini-cell,在工位间设置有移动式防护装置,防止一侧机器人焊接时另一侧对操作工人的伤害。
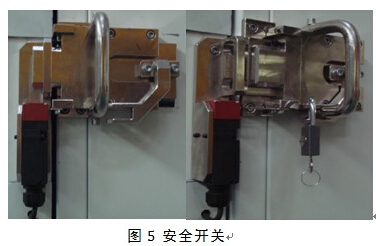
(2)安全栏上设置安全门, 安全门入口设置四级插拔式安全开关,与PLC连锁。人员进入工作站内部之前,必须先打开安全开关,同时在安全开关上加挂锁,并带好钥匙,防止其他人关门上锁启动系统。当安全开关打开后,机器人伺服电源断开,机器人停止运动。如果要启动机器人执行程序,则必须要把挂锁取走,安全开关闭合。
在mini-cell周边及内部,安装多个紧急停止开关,如主操作盘、双手启动按钮操作盒、机器人示教盒、机器人控制柜及工作站内部。紧急情况下,按下急停按钮后,系统所有设备停止运行。
(4)在mini-cell的电气控制系统中采用安全PLC或安全继电器。对于安全继电器或安全PLC,由于其采用冗余、多样的结构,并具有自我检测和监控、可靠的电气元件、反馈回路等安全措施,保证在本身缺陷或外部故障的情况下,依然能够保证安全功能,并且可以及时的将故障检测出来。在最大程度上保证了整个安全控制系统的正常运行,实现人和工作站的安全。
3.2 MINI型焊接机器人工作站的外部轴
为了满足和适应更多产品的需求,在mini-cell设计时,同时要考虑产品焊接过程中的稳定性和产品品质,最终选用的mini-cell具有多种不同类型的外部轴变位机。
焊接机器人的外部轴与其它机身6个基本轴一样,均含有伺服驱动器和伺服电机,与相应的机械传动装置相配合,可以有效扩大机器人的活动范围,并且能够在复杂或狭窄的空间内达到最佳的作业姿态,并且具有和机器人同样的重复定位精度。在弧焊实际应用中,包含外部轴驱动的焊接机器人能够准确到达所需焊缝位置,并达到最佳焊接姿态和角度,因而焊接效果更好而降低了焊接飞溅,焊接后的焊缝外形美观、焊接质量高。
3.3 mini-cell实现柔性生产
可用于焊接的产品种类多、品种复杂,在以往手工生产线上,如果需要混线生产同一型号不同种类的车型,人工焊接速度因工件、工具的差别而大大降低,生产的产品质量也随之呈现出不稳定性。
焊接机器人只需预先编制好适应不同产品生产所需的不同的程序,机器人将根据生产的工作指令,自动调用相应的工作程序与不同产品焊接所需的工具。工装夹具与变为机连接处采用快换装卸结构,便于卡具的更换。在电气控制系统中,控制柜与夹具间通讯连接采用航插方式,便于快速恢复控制。一般情况下,夹具换型可在20分钟内完成。这样mini-cell可用于多种产品的焊接,提高了产品的使用率。
4 MINI型焊接机器人工作站在应用中的注意事项
尽管mini-cell在近年YSR的项目中得到广泛应用,使焊接质量和使用空间等问题得到了极大改善,有效提高了企业的劳动生产效率,降低了用户的成本,但仍有部分的环节值得我们去注意。
4.1示教的特殊要求
Mini-cell由于空间紧凑,防护机构较多,不便于人工在线示教,故对示教要求较高,这个工作现在需要时间可能要大于一般焊接工作站。YSR采用仿真技术对其进行离线示教,降低了人工进行示教难度,大大提高示教的效率。
4.2 mini-cell的电气控制系统的特殊要求。
MA1400作为安川电机在全球推广的标准焊接机器人,其在焊接领域的应用时稳定可靠。为了保证电气系统与机器人系统相匹配,我们应提高电气控制系统的设计质量和制造质量,保证其稳定可靠。具体配置要注意:
电器元件的选择上,保证可以在焊接作业的环境恶劣、作业强度极大、电压波动较大这些情况下,不出现故障正常使用。YSR在夹具与电气控制系统间通讯采用ASI总线形式,提升控制设备的抗干扰能力,这将极大地确保mini-cell的生产稳定性。
4.3 对于机器人与其它设备干涉的特殊要求。
Mini-cell的优点在于提高了空间利用率,这也是mini-cell在不断开发过程中遇到问题和瓶颈最多的地方。机器人作为运动部件,在焊接过程中携带焊枪、送丝机和送丝软管等部件在不断的移动,为了避免与防护机构,安全栏等设备产生干涉,我们要反复进行示教调试工作。YSR在开发mini-cell的过程中不断地优化设计,积累了丰富的经验,使得mini-cell更加地完善。
5 结束语
随着我国工业经济的发展,机器人技术得到了广泛的应用。很多用户通过机器人的使用认识到了其价值,并在不断地提升其附加值。MINI型焊接机器人工作站是根据广大客户的需求,研制的一款工业机器人工作站,我们相信其应用市场将越来越广。
