0 引言
得益于电子技术突飞猛进的发展,单片机、驱动芯片很多,国内许多厂家制作的步进电机驱动器性能很好,但是客户对驱动器基本要求是一样的:性价比高、控制简单、安全可靠等。笔者设计了一种基于L298+L297的恒流斩波两相步进驱动器, 该驱动器本身带有脉冲信号源方便用户进行一些简单控制,设置和使用。在整、半步控制时,能维持恒力矩输出,比市场上同类产品性能更优越。而且驱动器斩波电流较大,恒转矩输出,工作可靠,内建有脉冲信号源方便用户进行一些简单控制,设置和使用非常方便。
1 L297功能分析
L297芯片采用模拟/数字电路兼容的I2L工艺,20脚DIP封装,通常以5 V供电,全部信号TTL/CMOS兼容,是非常适用于两相步进电机控制的专用芯片。L297的内部逻辑框图如图1,其核心电路是变换器。
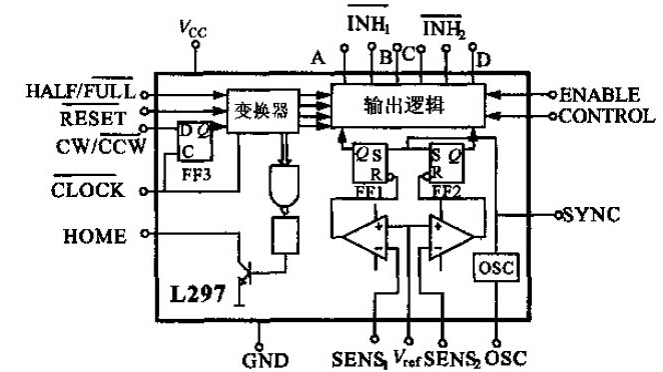
图1 L297的内部逻辑框图
由变换器产生4个输出信号送给后面的输出逻辑部分,输出逻辑提供禁止和斩波器功能所需的相序。为了获得电机良好的速度和转矩特性,相序信号是通过2个PWM斩波器控制,斩波器包含有一个比较器、一个触发器和一个外部检测电阻如图2,晶片内部的通用振荡器提供斩波频率脉冲, 振荡器输出的振荡脉冲频率f由OSC的外接RC决定频率=1/0.69RC。每个斩波器的触发器由振荡器的脉冲调节,当负载电流提高时检测电阻上的电压相对提高,当电压达到Vref时(Vref是根据峰值负载电流而定的),将触发器重置,切断输出,直至第二个振荡脉冲到来、此线路的输出(即触发器Q输出)是一恒定速率的PWM信号,L297的CONTROL端的输入决定斩波器对相位线A,B,C,D或抑制线INH1和INH2起作用。CONTROL为高电平时,对A,B,C,D有抑制作用;为低电平时,则对抑制线INH1和INH2有抑制作用,从而可对电机转矩进行控制。
图2 外部检测电阻
2 L298功能分析
L298芯片是一种高电压、大电流双H桥功率集成电路,可用来驱动继电器、线圈、直流电机和步进电机等感性负载。它具有两个抑制输入来使器件不受输入信号影响。每桥的三极管的射级是连接在一起的,相应的外接线端可用来连接外设反馈电阻。可安置另一输入电源,使逻辑能在低电压下工作。L298的内部逻辑框图如图3。
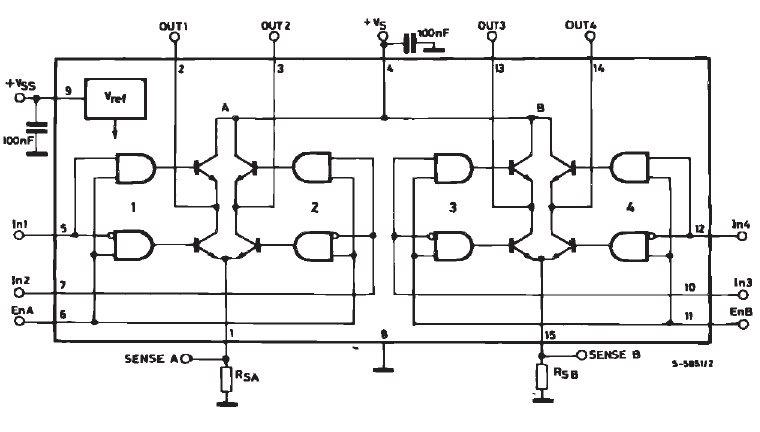
图3 L298的内部逻辑框图
L298的逻辑真值表如图4,当EnA为低电平时,IN1、IN2输入电平被抑制,桥路断开,电机停止。当EnA为高电平,IN1、IN2输入电平为一高一低,电机正或反转;IN1、IN2同为低电平或高电平, 桥路断开,电机停止。
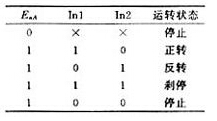
图4 L298的逻辑真值表
3 步进电机的驱动特性
两相步进电机的线圈绕组分为+A/-A相和+B/-B相,忽略电磁转矩与电流之间的非线性因素,要使电机平稳匀速、恒力矩转动,关键是控制电机绕组中的电流,如图5所示。
图5 电机绕组中的电流
在基本步单相激励驱动方式下,相绕组电流将按 I+A→I+B→I-A→I-B 4拍进行循环;在基本步两相激励驱动方式下,相绕组电流将按I+A 、I+B→I+B、I-A→I-A、I-B→I-B 、I+A 4拍进行循环,即整步驱动方式的电流矢量把一个圆平均分割成四份;在半步单、两相交替激励驱动方式下,相绕组电流将按,I+A→I+A 、I+B→I+B→I+B、I-A→I-A→I-A、I-B→I-B→I-B 、I+A 8拍进行循环,即半步驱动方式的电流矢量则可以把一个圆分割成8份。两相激励方式下产生的步进电流将是各相的合成电流矢量,分别为,I1、I2、I3、I4,其幅值是单相电流值的倍。因此,在半步单、两相激励驱动方式下,为了保持力矩恒定,在电流由双相转换为单相时,如I-B 、I+A→I+A,则+A-A相绕组的电流必须提高到双相电流I+A的倍,半步恒力矩运行电流随时间的变化如图6。
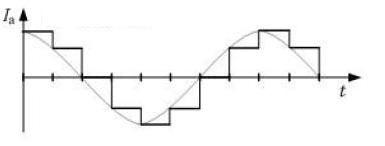
图6 半步恒力矩运行电流
同样,当基本步两相激励驱动方式改变为基本步单相激励驱动方式时,要维持输出力矩的恒定,相电流也必须为双相电流的倍。由于半步单、两相激励方式步进分辨率提高了一倍、且电机运转会更为平稳,而基本步两相激励方式的相线圈利用率高,能产生较大的力矩,同时会产生电磁阻尼,削弱或消除振荡现象,这两种控制方式较常被采用。
由于绕组电感的影响,绕组中的电流将按 规律上升。所以为了获得好的高频性能,使绕组中的电流上升波形变陡,可以用高电压驱动的方法来缩短电流上升到参考电流I的时间,能获得较好的牵出力矩并改善电机的启动性能.
4 电路解决方案
本设计的步进电机控制驱动电路包括电源电路、控制驱动电路、过流检测电路组成。
电源电路,如图7所示。内部5V电源取自LM117,LM117内置有过载保护、安全区保护等多种保护电路,允许的电源电压+24 到+40V,LM117前端接的C1、C2、C3用以抵消输入端的电感效应,防止产生自激效应。C5是为了瞬时增减负载电流时不至于引起输出电压有较大的波动。LED是电源指示灯。
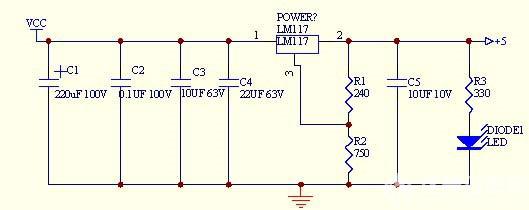
图7电源电路
控制驱动电路及过流检测电路,如图8所示。
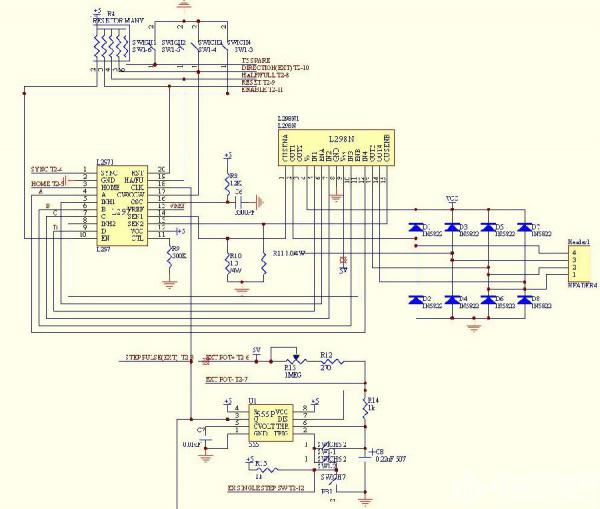
图8 控制驱动及过流检测电路
对于两相恒流载波步进驱动器的基本功能就是电机的方向,速度可通过上位机发送的脉冲信号控制,并为设备安全运行考虑,应具有急停(使能)功能。L297的CLOCK接收可以来自上位机,每个CLOCK的上升沿使内部的变换器改变状态,产生控制时序并从a、b、c、d引脚输出。L297还具内部同步斩波输出功能,以便于多个驱动器同步;内部半
步/整步控制等。对于单一的设备,这样的驱动器或许已经够用,而当面对各种客户,不同的设备,需要的电机也不一样,自然电流大小也是不一样的,那么在设计驱动器时,还需要从这个经济性角度考虑,驱动器应具备调整电流大小的功能。如图9,下滑滑动变阻器R7,NPN管的集电极电位变小,那么开关作用的NPN管完全开启时,发射极的电位约等于集电极电位,即L297上的Vref变小,L298反馈电阻上的最高电位也即Vref。此时从公式 Vref=I*r(反馈电阻),可以看出绕组内的I也将变小,反之变大。本电路中的反馈电阻为R10、R11,值为1.0Ω/4W。所以电机电流I(A)=Vref/1.0Ω。只需万用表测量JT2的1,2两端的电压值就可得到相应的电流I。
虽然L297+L298驱动器都具有内部半步/整步控制,但是若不改进控制电路,其输出的峰值电流不变的,这样会致使双相整步时的输出力矩是单相整步时的 倍,同样在半步状态也会有这样问题。那么力矩输出的不平稳会使驱动器的应用范围,可靠性大打折扣。
所以笔者为了保证步进电机恒力矩换相,如图9,
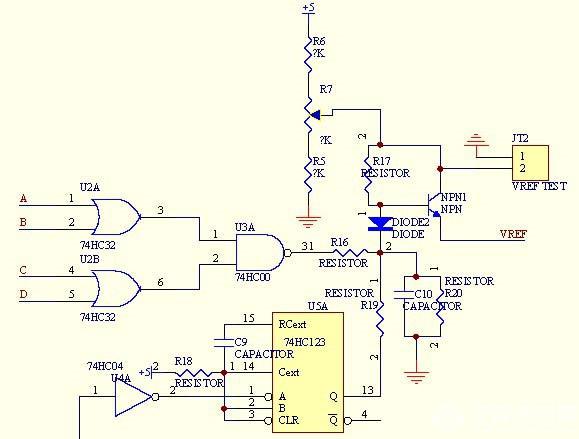
图9 恒力矩换相控制
将L297输出时序信号a、b,c、d信号经或门7432相或后再经与非门7400相与后,置R16低电平或高电平,从而改变NPN管的基极电位,控制其输入到L297的Vref电压大小。当L297输出单相激励信号或者半步单相激励信号使相绕组单相工作时,将提升Vref电压达倍。考虑到转矩电流特性的非线性,选取的元件参数使相应增大约1.4倍即可。另一方面,为了延长步进脉冲到来初始时刻的相绕组电流上升时间,需提高Vref电平。笔者将clock反相后输入74123单稳态触发器A,在L297的变换器改变状态的同时,74123在其Q端输出时间常数为0.45*R18*C9的高电平,从而通过R19去控制NPN管,使L297在该时间内的Vref升高。
在实际应用中,设备需要调试、诊断等情况,驱动器内部拥有555震荡器如图8,通过调整滑动变阻器R15,可改变震荡器Q输出脉冲频率,频率变化范围为10HZ到2000HZ,通过L297的clock控制L298桥路的切换速度,提高了电机的步进速度。如果要设置单步,只需要点动开关SW-2即可实现。L297的CW/CCW方向也可通过SW-4开关的高低电平来控制。当需要外部脉冲时,只需开关SW-6断开内部脉冲。
5 测试研究
将SIZE17两相混合步进电机接上驱动器,驱动器供电电压24VDC,分别设置驱动器工作于整步两相激励方式如图10,整步单相激励方式如图11,半步单、两相激励方式如图12。用示波器、电流钳测得的某相绕组电流波形:
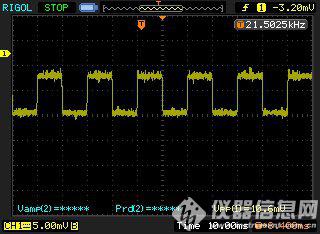
图10 整步两相激励
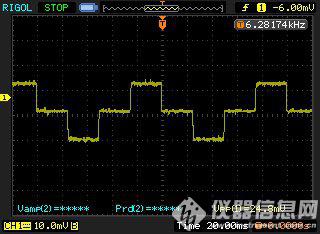
图11 整步单相激励

图12 半步激励
从单相激励和半步激励看,单相状态的峰值电流高于两相状态的峰值,实际测试约为1.3-1.5倍,达到了设计要求。
6 结束语
该步进电机驱动器,适合于驱动电压不超过40V,电流不超过2.0A的两相、四相双极性步进电机,基本涵盖了SIZE23以下的主流混合步进电机。广泛用于医疗器械、分析仪器,基于主要芯片L297,L298技术成熟,价格便宜,该款驱动器性价比高,市场销量大,反馈良好。
参考文献:
[1] ZHAO T.Applicatim of 3955 in steper motor microstep—ping control[J]. Mechanical& Electrical EngineeringMagazine,2003,20(2):46—49.
[2]史敬灼.步进电动机伺服控制技术. 北京:科学出版社, 2006-7-1
[3]邓星钟. 机电传动控制. 华中理工大学出版社出版. 1998
[4] 谭建成.电机控制专用集成电路[M].北京:机械工业出版社,2003
