王 剑
(天津航海仪器研究所,天津 300131)
摘 要:随着社会老龄化进程的不断发展,老年人口所占比重也逐年增加,而老年人的生理特点造成了他们这一人群的特殊行为特征棗易跌倒。为了解决跌倒监测、报警求助和步态加速度数据等问题,本文在分析比较国内外跌倒检测及相关技术的基础上,考虑了系统的实用性等因素,设计了一个跌倒检测的实时监测系统,它采用MEMS三轴加速度传感器ADXL345进行加速度数据采集,中央处理器TMS320F2812进行数据分析,并设计报警器来完成监测系统的搭建。实验结果表明该系统在老人跌倒时能够监测并进行报警,为及时进行救援赢得了宝贵的时间。
关键词:跌倒检测;微机电系统;TMS320F2812;加速度传感器
中图分类号:TP271 文献标识码:B 文章编号:1003-7241(2013)06-0081-05
1 引言
随着社会老龄化进程的不断发展,老年人口所占比重也逐年增加,而老年人的生理特点造成了他们这一人群的特殊行为特征——易跌倒。跌倒检测技术的方法很多,从信号采集的渠道进行分类,将跌倒检测技术分为三类:基于视频的跌倒检测系统,基于声学的跌倒检测系统,基于穿戴式传感器的跌倒检测系统[1]。基于视频的跌倒检测系统只能在安装了摄像机的地点进行检测。另外还可能会对被检测者造成个人隐私的泄漏。因此通常这种方法无法得到很好的精度,一般只能作为其它检测方法的辅助检测。基于穿戴式传感器的跌倒检测系统不会受到检测地点的限制,所以基于穿戴式传感器的跌倒检测系统比基于视频或声学系统更适合应用于跌倒监测器[2]。
为了解决老年人跌倒实时检测问题,本文设计了基于穿戴式传感器的跌倒实时监测系统,其中的传感器采用MEMS是因为它的低成本、低功耗、小尺寸和批量化,而且随着技术的进步,它又向高精度传感器的方向发展[3,4]。监测系统的检测原理是通过跟踪传感器佩戴者在三个正交方向的加速度变化来检测其体位的变化,然后以跌倒检测算法对数据进行分析,以确定佩戴者的身体是否跌倒,如果跌倒则进行报警。而判别是否发生跌倒的方法主要有判断阈值的方法和利用模式识别的方法。当佩戴者发生跌倒时,各方向上的加速度矢量会发生变化,通过设定有效的阈值,当判断到某方向的加速度矢量超过阈值时,结合时间长度判定是否发生跌倒。
2 硬件设计
跌倒监测系统设计时需要遵循的原则[5]有:
1.所有超出阈值的情况都能够检测到;2.能够确定需要报警的情况;3.能够通过分析测得的数据来确认真正的跌倒;4.能够在一定范围内的任何地方,在最短的时间内报警;5.不会影响使用者的正常生活;6.可靠,易于维护;7.不会再跌倒时造成使用者的受伤;8.可根据使用者的需要进行必要的调整;9.易用,不需要太多学习;10.能够进行自测,确保工作正常。
本文基于MEMS三轴加速度计设计了老年人跌倒监测系统,该设计采用传感器进行信号采集,然后通过采集到的信号判断跌倒报警器的配戴者是否跌倒,并且将实时数据在显示装置上显示出来,如果佩戴者跌倒则通过报警器进行报警。检测原理框图如图1所示。
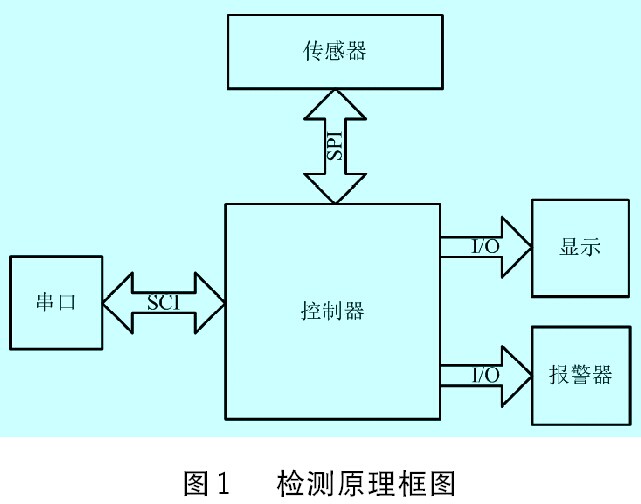
2.1 控制器
作为跌倒检测的核心,它负责进行系统的整体运行,包括控制加速度传感器进行加速度的采集以及数据的处理分析,判断佩戴者是否跌倒等一系列工作。本设计选择TI公司的TMS320F2812[6],它拥有运算精度高,处理能力强,灵活性高等优点。
2.2 传感器
传感器负责获取人体活动的加速度信号,本设计选择ADI公司的三轴加速度传感器ADXL345,它拥有体积小,功耗低,分辨率高(13位),测量范围大(±16g)等优点[7,8],而且它的输出为数字输出,简化了处理器进行数据处理的过程,提高了检测的效率。
2.3 显示、报警器
显示电路负责加速度数据的实时显示,本设计采用SO12864进行显示[9],它拥有驱动电压低,工作温度范围大等优点,而且它内置汉字库,因此编程简便,使用起来比较方便。为了节省成本的一系列考虑,报警器则采用蜂鸣器。
3 软件设计
3.1 软件系统功能
软件设计是各项功能实现的关键,通过软件设计,应该使系统能够实时监测和控制外围功能模块,及时处理异常情况,还要实时采集三轴加速度传感器输出的加速度矢量,并且通过算法判断是否发生跌倒,如果发生跌倒则进行报警。
3.2 SPI通信
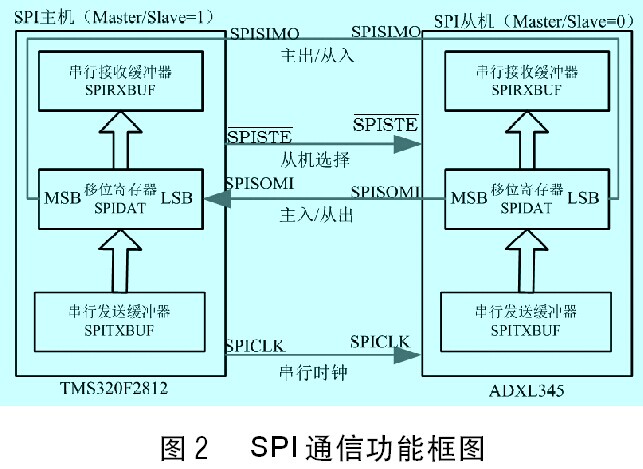
在整个系统中,最重要的是加速度的采集、传输与处理,其中采集由传感器完成,而传感器与处理器之间是通过SPI通信建立连接,传感器ADXL345与处理器TMS320F2812通信连接的功能框图如图2所示,它们的连接方式为主从式,主机为处理器TMS320F2812,从机为传感器ADXL345,主机通过发出SPICLK信号来启动数据传输,对于主机和从机,数据都是在SPICLK的一个边沿移出移位寄存器,并在相对的另一个边沿锁存到移位寄存器。
3.3 跌倒检测算法设计
(1) 模式识别算法
利用模式识别的方法实现跌倒检测的有很多种,其中西安交通大学研究的跌倒检测算法比较具有代表性。该系统中跌倒检测分为两个层次的算法:预处理和高级处理。
预处理是通过支持向量机算法从输入中提取疑似跌倒数据。所采用的算法One-class SVM算法是由SVM算法扩展而来。该算法利用核函数将所有样本映射到高维特征空间实现分类。在特征空间里,One-class SVM确定一个包含所有目标数据的最小超球体表面,这个表面就是分类器。用一组松弛变量来平衡超球体的半径和超出超球体的样本数量。这种算法使大多数阳性样本(跌倒样本)被保留,而大多数假阳性样本被放弃。高级处理是通过KFD算法将可疑数据实现最佳的分离,再通过k-NN算法实现精确分类。
(2) 简单算法
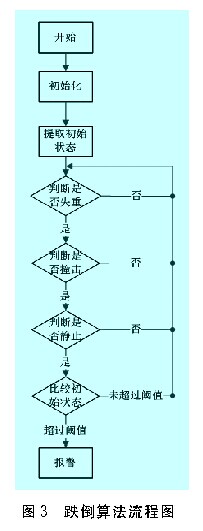
由于人的跌倒过程会依次出现失重、撞击、静止这三个现象,该算法以此为判断依据,具体的判断依据如下:
◇ 失重现象发生在跌倒之初,加速度的矢量和降至近0g的水平,持续时间取决于自由跌倒的高度,此为确定跌倒的第一个判断依据,可以由ADXL345的FREE_FALL中断来检测。
◇ 撞击现象发生在失重现象后,该现象表现为剧烈冲击,由ADXL345的Activity中断来检测,此为确定跌倒的第二个依据。
◇ 一般在跌倒撞击地面后,人体无法立即站起来,因此人体会在短时间内保持静止状态,由ADXL345的Inactivity中断来检测,此为确定跌倒的第三个依据。
◇ 由于跌倒后人体会翻转,因此三个轴的加速度与跌倒前的初始状态有所不?同,因此需要在Inactivity中断之后读取三个轴的加速度数据,然后将采样数据与初始状态进行比较,确定跌倒的第四个依据是采样数据与初始状态之差是否超过一定阈值(如0.7g)。
这四个依据共同构成整个跌倒检测算法,在此基础上系统可根据跌倒状态报警。中断间的时间间隔必须在一定范围内,正常情况下,FREE_FALL中断与Activity中断之间的时间间隔不应过长,除非从极高处跌落,具体的跌倒检测流程图3所示。
上述两种算法各有特点,模式识别算法精度高,误报率低,但结构较复杂,运算量大,对控制器的要求较高,而简单算法实施起来比较简单,但是精度略低,有一定的误报率,但经过试验后发现误报率在可接受的范围内,因此本文采用简单算法。
4 实验测试
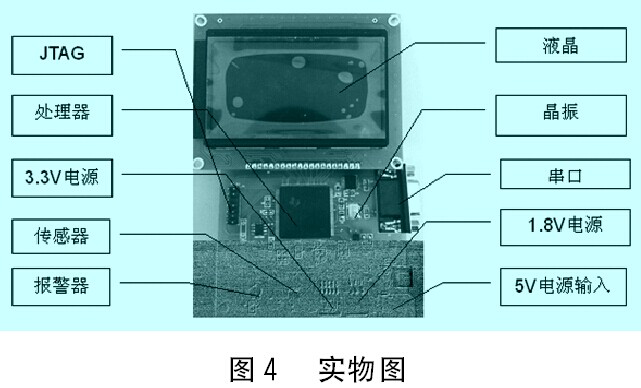
按照上述方案设计完成的跌倒监测器样机线路板如图4所示,上电后,该线路板各功能模块工作正常,针对系统的整体测试主要分为两步,分别为静态测试与动态测试,下面分别进行介绍:
4.1 静态测试
静态测试的测试方法为测试X轴、Y轴、Z轴分别向上与向下时各个轴的加速度数据,选用的测量精度为10位,测量范围为±2g,经100次实验测量取平均后测得的数据如下所示


由于ADXL345输出的是补码,因此需要将输出转换成原码,方法为将Datax、Datay、Dataz的值与32768比较,如果它们的值小于32768,说明它们是正数,则它们的原码为本身,如果它们的值大于32768,说明它们是负数,则用它们的值减去65535才能得到原码,处理后得到一组新的DATAX、DATAY、DATAZ,因此我们得到的加速度最终值如下,单位为g
通过以上处理后,可以看出当某一个轴竖直向上和向下时,它的加速度值接近±1g,而其它两个轴接近0g,由于向上、向下的方向都是目测的,因此得到的结果存在一定的误差,但总体上在在我们的允许范围内,符合我们预期的要求。
4.2 动态测试
动态测试主要是模拟跌倒时测试加速度的变化,测试方法为通过串口采集模拟跌倒时加速度的值,然后将采集到的值保存下来使用matlab进行处理并且绘制加速度曲线。
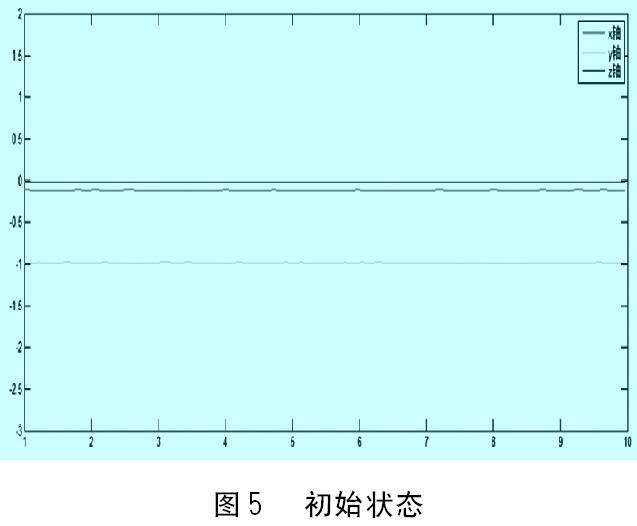
动态测试分为两步,第一步进行初始状态的采集,采集到的加速度曲线如图3所示,从图中看出Y轴数据接近-1g,而其余两个轴接近0g,与佩戴者将Y轴向上的情况相符合。
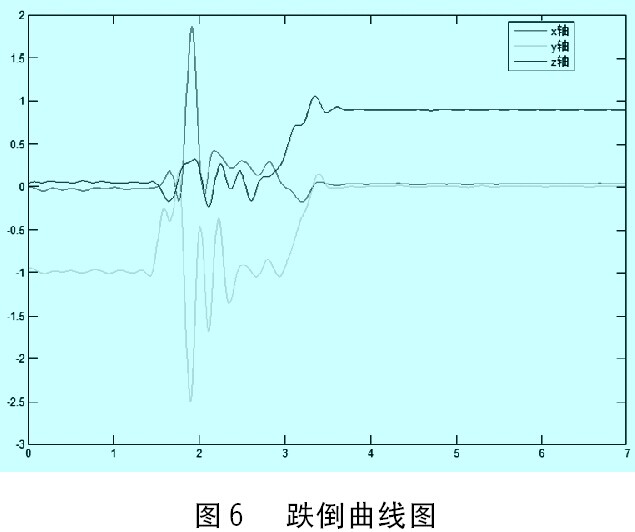
动态测试的第二步为对模拟跌倒的加速度进行采集,采集到的加速度曲线如图4所示,从图4中可以看出,在跌倒之初,三个轴的加速度和有一个急剧下降的过程,然后人体与地面剧烈碰撞,加速度和急剧上升,然后人体处于静止状态,它的三个轴中Z轴的加速度接近1g,其它两个轴接近0g,与初始状态不同,说明人体已经跌倒,符合预期的结果。
5 结束语
老年人跌倒检测系统采用TI公司的TMS320F2812作为核心控制单元,对加速度采集的数据进行处理与分析,并判断佩戴者是否跌倒,如果跌倒则控制报警器进行报警,并且控制SO12864显示实时的加速度数据。实际产品中报警显示器与跌倒检测系统是分离开的,并通过无线网络连接。若老年人跌倒,通过GPS可实现监护者对老年人单向定位。另外由于时间关系,跌倒检测算法需要在日后进一步完善。
参考文献:
[1] 邹众鹰,谢存禧.基于家庭的远程健康监护系统进展[J].计算机工程与应用,2005,30(10):20-34.
[2] 孙新香.基于三轴加速度传感器的跌倒检测技术的研究与应用[D].上海:上海交通大学,2008.
[3] 周凤岐,刘智平,周军等.硅微技术在导航、制导与控制中的应用及发展趋势[J].测控技术,2007,26(3):5-7,21.
[4] 丁衡高,袁祖武.微机电系统技术的实际应用棗微型仪器[J].国防科技大学学报,2000,22(2):90-94.
[5] 赵祥欣.基于三维加速度传感器的跌倒检测研究[D].杭州:浙江大学,2008.
[6] 苏奎峰,吕强,耿庆峰等.TMS320F2812原理与开发[M].北京:电子工业出版社,2006:11-18.
[7] 李兴法,尹冠飞.数字式加速度传感器ADXL345的原理及应用[J].黑龙江科技信息,2010,(36):2,14.
[8] 黄晓东,黄晓华.微电子机械系统ADXL345的应用研究[J].企业技术开发,2012,32(16):28-30.
[9] 康海洋,杨风.基于TMS320F2812的液晶显示模块SO12864设计[J].电子测试,2010,9(9):54-57.