目前汽车的功能趋向于软件控制、电气化,一个功能的实现往往需要多个系统协同配合来完成,在这种背景下,汽车系统级功能的实现时间如何确定、如何仿真分析?今天我们就来听恒润谈一谈如何解决系统级的时间仿真分析!
一般来看,功能的实现需要信息的传递,信息的传递无非经过两种介质。
◾ 传感器、控制器、执行器、网关、交换机等设备的内部(在此统称为ECU)
◾ 总线网络
在ECU内部信息的传递有哪些影响因素?
首先会受到任务的触发方式(周期型、中断事件型),同时也会受到任务的类型(可抢占、不可抢占、协作式)的影响。在此我们创建了一个简单的案例用以说明在ECU内部信息传递受到的影响:
某程序代码的任务分为3个,T1/T2/T3,均为周期型可抢占任务,优先级T3低,T1高。如果某一时刻3个任务均需要执行,那么低优先级的任务T3的延迟时间如何确定?分析结果如下:
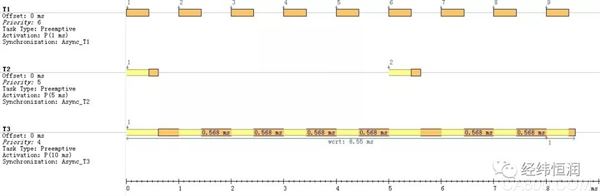
从分析结果来看,我们发现这种情况下T3从触发开始到执行完毕一共需要8.55ms。
在总线网络上信息的传递有哪些限制呢?
首先肯定是信息数据的长度以及传输波特率;其次是总线网络的特性,比如LIN的调度表时序、CAN的ID仲裁、FlexRay的时隙发送,以太网更为复杂一些,有传输层TCP协议的流量控制、重传、应答等影响,有CBS的算法影响,有大数据报分段的影响,后续也可能会考虑到有帧抢占的影响;还有发送方式的影响,周期型、事件型、混合型。
鉴于以上对ECU内部以及总线网络上的时间影响分析总结,我们使用Symtavision搭建了一个案例进行展示:某网关接收到一个CAN报文,然后经过处理将该报文的信息经过以太网和交换机传递到接收方。分析结果如下:
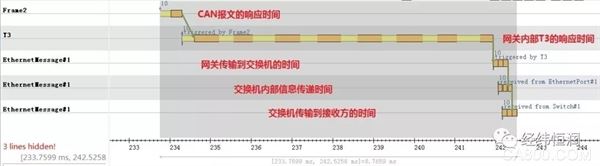
从分析结果可以看出,Symtavision支持通过将每个环节的时间分析串联到一起,完成系统级时间分析,系统级时间为8.7659ms。
相信大家看到这里之后,对于Symtavision的功能有了一定的了解。接下来我们看一下各位专业工程师可能关注的问题:
电子电气架构工程师:Symtavision支持的工具链如何?是否可以承接上游架构设计工具?
hirain: Symtavision支持Vector, Mentor, DS, IBM等相关EE架构、网络设计工具形成的数据库文件,并且通过API支持二次开发以及工具链整合工作。除此之外,恒润科技内部通过对Symtavision以及SystemWeaver(国内某整车研发中心EE协同研发平台,支持千人级电子电气协同研发)进行集成,实现从需求、功能层级对于功能任务链时间的设计、分配、并对设计进行仿真分析及验证。
功能安全工程师: 如何根据分析结果判定功能是否有问题?
hirain: 恒润科技技术团队可以支持根据仿真分析结果的分布情况帮助客户完成判断功能实现是否存在问题的标准制定。
ECU工程师&网络工程师: Symtavision支持的协议有哪些?
hirain: Symtavision支持的ECU调度标准:AutosarOS, ERCOSek, RTAOSEK, GenericOSEK;Symtavision支持的总线协议:LIN, CAN(FD), FlexRay, Ethernet;同时Symtavision支持创建功能任务链实现从ECU到总线网络上形成系统级时间性能仿真分析。
测试工程师: 我们现在有CANoe录制的总线trace文件,Symtavision可以进行分析吗?
hirain: Symtavision支持总线的trace文件以及ECU的trace文件导入自动建模并分析,直接输出负载率、时间分析结果。支持的ECU trace文件:Lauterbach, iSystem, GLIWA等记录的数据,支持的网络trace文件:CANoe和VehicleSpy等记录的CAN(FD), FlexRay数据。同时恒润科技的技术团队具备根据特定设备trace文件进行定制化脚本导入的开发经验,可以提供定制开发。
经过以上的介绍,相信各位已经对Symtavision有所了解。在汽车电子电气系统日益趋向软件化、智能化的今天,Symtavision对ECU调度分析、网络时间分析以及系统级功能实现的时间判定会给各位提供很大的帮助和便利。