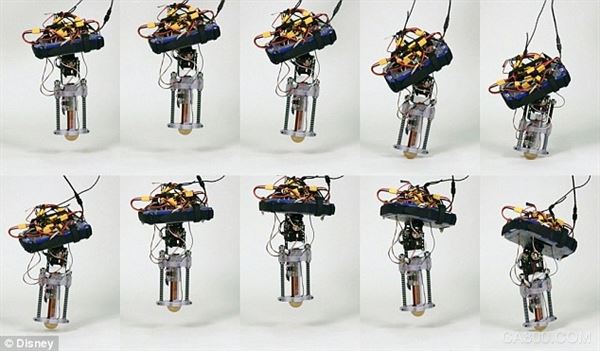
迪士尼研究中心设计出世界上第一台靠锂电供能的单足跳跃机器人,这将有助于科学家在“动态平衡”领域作进一步研究。
前波士顿动力CEO马克?雷柏特早在80年代就制作了一个三维跳跃机器人,通过一条简单的控制算法就可以完成机器人的平衡动态运动。迪士尼研究中心正因为受到马克的启发才让单足机器人“跳”了出来。
研究中心的报告表明:“在动力学层面,我们的机器人与雷柏特的设计相似,因此可以用他的简易算法作为现成工具控制我们的机器人。” 通过对算法修改,机器足得以保持平衡。
山根胜表示,大部分单足跳跃机器人都配备了液压装置,但应用这种技术需要连接外置发动机,所以机器人的性能有所局限。为了解除限制,研究团队开发出一种轻量的内部微型计算机,让这台只有30厘米高的机器人能够向四面八方连续跳跃19次并维持7秒左右的平衡。但研究人员意欲增加内置计算机的电量,希望它能保持更长时间的直立状态。
另外,早期研制的大多数跳跃机器人的躯干都比足部重得多,而迪士尼研发的躯干重量只是机器足的两倍,减重有助于实现动态平衡。