在2007 FA/PA展览会上,山东力创带来了与山东大学数控技术研究中心联合开发的IFSB实时高速总线多轴运动控制平台。
IFSB实时高速多轴运动控制平台及应用总体介绍
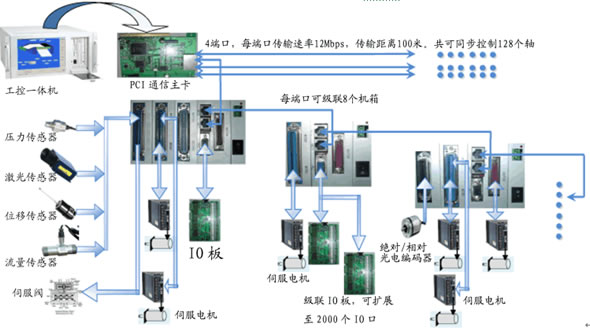
IFSB (Industrial Field Serial Bus)是一种适合于实时高速多轴同步运动控制的网络总线。在基于标准PC的运动控制器与标准
伺服驱动器(模拟或脉冲控制信号可配置)、步进电机驱动器、变频器、数字I/O、模拟I/O、绝对编码器以及用户自己制造的符合IFSB接口的各种设备之间提供一个端口12Mbps的传输速率的同步实时连接(系统有四个端口,可提供高达48Mbps传输速率的高速同步实时总线),可支持最多达128轴的实时同步运动控制,接口机箱可方便级连,扩展方便,机箱的级连线长可达100米;所有信息以数字形式在控制器与设备之间传输,支持系统复杂模型的集中控制;硬件实时同步使得通讯周期的最大抖动小于500ns,可满足高速高精度的控制要求。操作系统支持WINDOWS2000/XP,XP Embedded以及Linux,在无实时操作系统支持下,系统的更新周期可达500us,有实时操作系统支持时,系统的最小更新周期可达200us(3轴)。用户可采用C/C++,VB,Delphi,C#通过调用用户动态链接库(DLL)或ActiveX进行编程,为不同行业应用领域提供一个通用运动控制平台,满足当前企业对控制器二次开发的迫切要求。不同的企业可以根据其自身的特点,在此平台上将自己的专有知识结合进
控制系统,开发出专有的运动控制器,形成有自己特色的产品。摆脱传统运动控制器的束缚和依赖,形成具有企业自主知识产权的控制器,提升企业产品的核心竞争力。这种技术大大缩短了控制器的设计、安装、调试和维护的时间,降低了产品设计、制造和服务的成本,加速产品的上市时间。
IFSB实时高速多轴运动控制平台系统框架

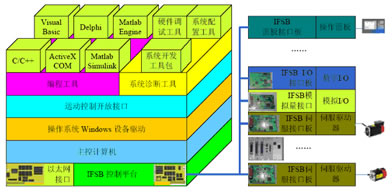
该平台完全基于标准PC,在主机端可插接PCI,ISA或PC104或PC104Plus总线的IFSB主通讯卡,通过总线与系统要求的各种接口卡简单级连交互各种信号,由计算机完成各种复杂的算法控制。目前IFSB接口还未与伺服电机驱动器集成在一起,为保证系统能与标准伺服驱动器相连,我们开发了一个带IFSB总线背板的3U机箱,机箱有多种规格可插一个电源模块和3-7块应用接口板(见第四部分的表),各种应用接口卡使得系统能与各类
传感器和执行机构接口,扩展了系统的应用范围。如果一个机箱满足不了系统的要求,可以多级级连,机箱最多可级联8个。
计算机操作系统可采用Windows2000/XP/XPE或Linux操作系统。为保证控制系统的实时性有两种解决方案:(1)加实时扩展RTX或RTLinux,采用Windows和RTX扩展时操作系统的软件版权费比较高(一套版权费需5000多元人民币),而Linux和RTLinux(或RTAI)是免费的; (2)在Windows环境下不加实时扩展,通过Windows内核中段服务程序(ISR)编程可以达到实时性的要求。Windows操作系统环境的开发资源和应用程序丰富,熟悉开发技术的人员多。所以目前我们采用Windows加内核编程的方法来满足控制的实时性要求。经测试采用这种方法系统可以响应20k频率的中断
数控系统平台支持Windows 2000/NT/XP等。数控应用程序支持集成开发环境象Microsoft Visual Studio 或者Borland C++,Delphi等面向对象工程语言进行开发,同时系统开放内核数据结构。进一步地系统还提供Labview和Mathlab的编程接口。下位机数据通过总线接口以及系统开发工具包对用户开放。用户应用系统的开发过程如下:
1.系统硬件系统配置。系统具有硬件自动识别和枚举功能,系统配置工具能对接入系统的模块功能进行识别和配置,通过硬件调试工具,分析硬件系统结构,生成硬件系统配置文件。
2. 进行运动控制系统功能定义。根据硬件系统配置信息,定义系统功能。主要包括联动轴、驱动器控制模式。定义内核数据结构,位置控制模式,数据交换方式等。
3.根据系统硬件结构,采用系统开发包进行控制系统功能定义。采用系统开发工具包分析机械系统动态参数以及动态响应特性,调整系统运动参数。
4.基于Windows组件对象模型,根据给定用户接口,开发应用程序组件,ActiveX或COM(用户可以开发自己的译码组件、刀具补偿组件、插补组件等)。
5.采用用户熟悉的工程开发工具,在Windows环境下对系统进行功能开发。系统支持用户自定义控制策略,但这需要支持的系统开发工具。
IFSB实时高速多轴运动控制平台系统特色优势 ⒈ 采用Windows 设备驱动程序模式,利用运行于内核的Windows设备驱动程序,截获系统中断,在ISR中实现实时功能。同时实现系统调度功能。不用实时操作系统可满足运动控制的实时要求;
⒉ IFSB满足了开放结构控制器的用户可以在较大范围内根据需要选择和配置硬件,为解决下一代的数字化驱动接口提供了途径,可以在设备控制层实现分布式控制。
⒊ IFSB采用通用Windows操作系统实现了硬实时控制,为实现控制系统的复杂模型控制、高速、高精度性能奠定了基础。
⒋ 系统硬件扩展方便,当控制轴数和I/O点数增加时,对数控系统硬件结构没有影响,便于控制系统的扩充和裁减。