以更专业的功能软件FPWIN GR7为基础架构,后续将不断丰富更多功能,面向各行业应用扩展更专业的命令内容。
(通用型Ver.2.5以上对应,运动型Ver.2.7以上对应)
|
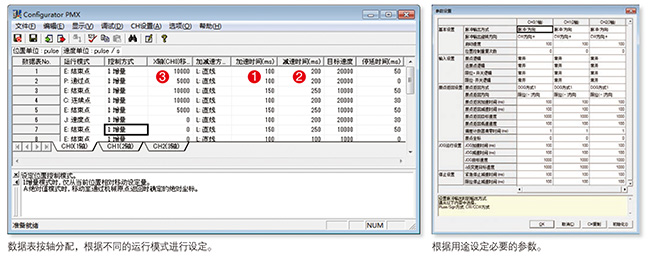
位置控制设定
通过位置控制数据※1及位置控制参数※2的设定,实现位置控制。
|
|
※1 位置控制数据是指移动量、目标速度、加减速时间、运行模式等个别位置控制动作的信息。
※2 位置控制参数是指JOG 运行及原点返回的运行条件、限位输入逻辑、停止时的减速时间等。
|
|
|
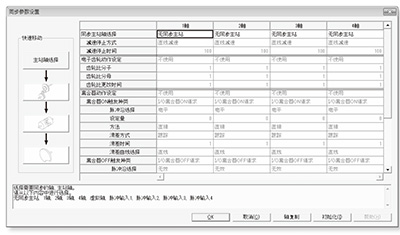
同步参数设置
根据用途选择需要同步的轴及主动轴,并对选定的轴进行参数设定,实现同步控制。
|
|
|
|
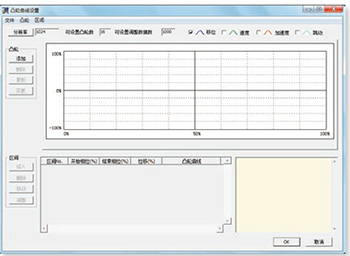
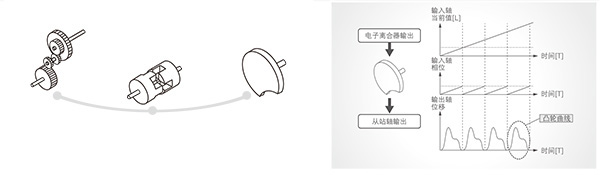
凸轮曲线※3设置
当选择电子凸轮作为从动轴时,需要对其进行设定。
|
|
|
|
|
※3 凸轮曲线是指以主站轴旋转1 圈为动作基准,主站轴的各相位(旋转角度)下从站轴的位移量,在配置画面中进行设定。
|
|
|
直接输入/输出功能
通过直接输入输出功能能够实现不依赖扫描周期的高速应答处理。
|
|
|
|
|
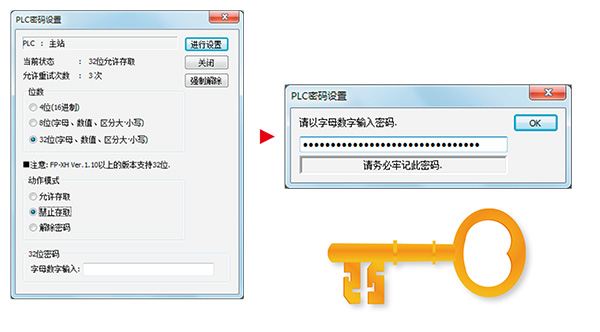
安全强化
增加字母数字32位密码对应。安全性较之前得到了提高。
|
|
|