一、控制结构
1.简介:

CANopen与EtherCAT是国际上网络运动控制的开放标准协议。它们可以简化连线、降低成本、增强诊断功能等。CANopen主要应用于分布式控制系统,而EtherCAT可以应用在集中式与分布式2种控制结构中。每种网络都有其自身的优点。泰科智能为这2种网络控制结构提供一个齐全的步进与伺服驱动控制解决方案。同时,还提供相关的软件工具,以简化系统调试,且易于从CANopen网络移植到EtherCAT网络。
2. 集中式与分布式运动控制:
系统任务的等级与分配如下图所示。绿色表示控制器,蓝色表示驱动器。在集中式结构中,除了电流环以外,所有的任务都由控制器完成。电流环应该至少每100us更新一次,这会把很高的计算负担放在控制器上,且必须使用高速数据通讯链路。
在分布式控制系统中,所有的伺服环都在驱动器内完成。在轮廓模式(下载运动参数并启动运行)下,驱动器内部也执行路径规划。驱动器无需增加附加的成本,而且能省去运动控制卡。由于位置环的刷新率远低于电流环,因此只需使用一个低速的网络即可。
集中式

·更适合轴间高度耦合的情况如机器手
·更高效的实时伺服环调整
·要求更高带宽网
分布式

·点到点及多数轮廓曲线的理想选择
·低成本解决方案、最小化驱动器尺寸
·只要求低带宽网络
·易扩展、无增加控制器负担
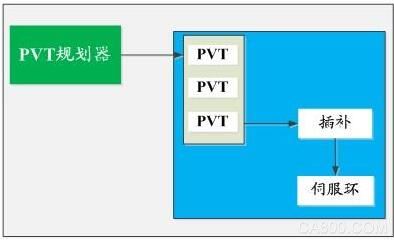
3. PVT路径规划:
在分布式控制协同运动系统中,EtherCAT和CANopen都使用PVT做路径规划:控制器生成一系列的点,来定义在指定的时间点上,每个轴的位置与速度值。PVT路径规划是定义运动轨迹的一种非常高效的方法。
一般来说,轨迹点每隔10ms被发送到驱动器的缓冲区中。驱动器实行三阶插补来生成最优的曲线。插补之后,每个驱动器上的位置环以几千赫兹的速率同步更新。
4. 网络的速度与效率:
对运动控制系统网络而言,效率、决定性与同步性远比速度重要。标准以太网的传输速度超过CANopen 速度100倍,但主要被设计用于异步传输大数据文件。网络上的消息冲突是毁灭性的,必须重新发送。CANopen主要被创建用于低成本传送实时小数据包,对于分布式控制而言,完全可满足其实时性要求。
EtherCAT给以太网带来了同步性与决定性,相对于许多被实时修改过的标准以太网,EtherCAT显然是最有效的。对于分布式控制系统,它满足刷新驱动器电流环的速度的要求,且能灵活地传输PVT点。但是,EtherCAT驱动器相对同等的CANopen驱动器而言,价格更高,体积也更大一点。
二、技术概述
1. CANopen简介:
CANopen是建立在CAN数据链路层之上的一个开放的标准应用层。CAN最初为汽车应用领域而开发设计,到目前已经被证明是坚固、可靠、经济的通信网络。可以进行主/从和点对点的通信,消息冲突不是毁灭性的。
从轴通过被锁定时间标记的分布式时钟进行同步。参数与实时数据分别由SDOs与PDOs进行处理,以达到最优效率。对于一个完整的系统解决方案,可支持第三方的I/O与控制软件。
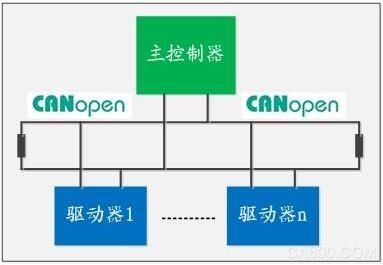
2. 网络拓扑与总线仲裁:
CAN是一个使用简单双绞线连接的多点网络。最大速率可达1Mb/s、线长可达40米。网络首尾两端须接终端电阻,且端线应尽量的短。一个CAN网络最多可支持127个节点。
当总线空闲时,任何一个节点都可以发送数据。消息帧以帧有效低起始位开始发送这消息的标识符。越低的标识符,它的优先级越高。如果两台设备在同一时间向网络发送数据,有高优先级标识符的设备将会强制性把总线电平拉低,而低优先级的节点设备将识别到这个情况且将放弃使用总线。
3. 同步:
可以在几毫秒的时间内实现CANopen从轴之间的同步。在启动时,一个被指定的从轴广播发送一个同步消息以建立网络时间基准,同步消息(由从轴的内部时钟定义)的最新实际时间将周期性地广播发送给其他同步轴。每个同步轴都将使用该时间标记以不断调整自己的时钟来保持同步锁定。
4. SDOs与PDOs:
SDOs主要被用于从轴配置参数的异步传送。CAN数据域的8个字节中的某些字节定义了配置参数在从轴中的位置。如果数据包是4个字节,则只需一个CAN帧即可,尽管从轴必须应答这个SDO。在随后的多个帧中,更长的数据包可以以7个字节的数据块被发送。
PDOs提供了传送8个字节或少于8个字节实时数据包的有效方法。全部8个字节的数据域都可用这个方法,因为PDO已提前被映射到相应的从轴控制功能。一个PVT矢量可以在一个CAN帧中被发送。PDOs也可由一个从轴初始化,就像给主轴发送一个中断一样。
5. EtherCAT简介:
EtherCAT是一个为实时控制创建的开放标准。快速与决定性、EtherCAT能在100us之内以刷新100个带8字节数据的从轴。它支持所有网络拓扑结构,可以使用铜电缆或光纤做介质。EtherCAT利用CANopen与SERCOS设备配置,使移植更简单便利。EtherCAT主控制器使用标准硬件,无需一个附加的通讯处理器。从轴使用定制化的ASIC或FPGA,相对于标准的以太网节点,成本费用基本可以忽略。
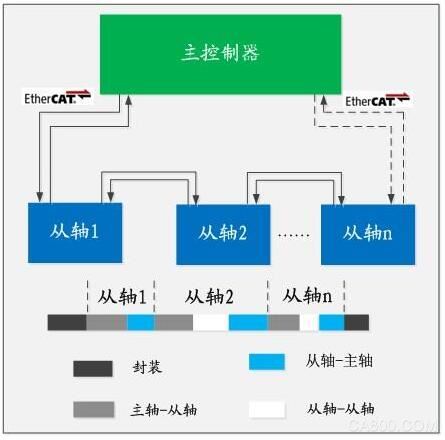
6. 消息与网络拓扑:
EtherCAT通过在一个标准的以太网报文中,设定从轴一个唯一的时间段,优化网络带宽。每个从轴读取主轴的数据,且在报文通过时并插入自己的数据。这些数据也可以做下游节点的主控制器。
最常用的EtherCAT拓扑是直线型的。由于EtherCAT是全双工通讯,将最后一个节点连回到主机(构成环路)以提供网络冗余。EtherCAT最多支持65535个节点,节点之间电线长度可达100米。
EtherCAT可适应星形拓扑,但是该拓扑要求从轴以开环模式运行。在当前ASIC实现的从轴中,开环模式还不可用。但是以基于更加灵活的FPGA技术设计的泰科智能伺服驱动器,是可以使用星形拓扑的。
7. EtherCAT同步:
类似CANopen,EtherCAT使用分布式时钟来同步网络节点。主轴使用来自每个从轴的时间标记信息以调整分布式时钟。即使有数百个节点,同步时间误差也可能小于1us。
8. CANopen over EtherCAT(CoE):
CANopen over EtherCAT执行标准的SDO与PDO通讯机制。甚至网络管理也是非常类似:应用代码可以被重复使用,容易移植到EtherCAT。CANopen设备属性也可以被扩展到高带宽的EtherCAT上使用。
1. 控制软件
泰科智能的分布式控制软件使系统的试运行变得快速而简单。控制CANopen或EtherCAT,无需低层代码的开发。全部的网络管理只需要注意到已经被链接到应用程序的某几条简单命令即可。
泰科智能支持两种开发环境 MLC:(C++运动函数库)链接到一个C++应用程序;MLO:(COM目标库)可以被用于Visual Basic,.NET,LabVIEW或任一兼容COM的软件。 应用代码与对伺服或步进驱动器的控制对象在MLC/MLO函数库中接口。这些对象可以被链接到CANopen或EtherCAT的通信对象上。不管是执行CANopen还是EtherCAT,基本的应用代码都保持不变,可以简单的从CANopen网络移植到EtherCAT网络。也可以在同一台PC上组合运行EtherCAT与CANopen。
网络管理
·配置和启动
·同步
·消息生成
·错误管理
运动控制
·路径规划
·PVT生成
·执行曲线
·PVT缓冲区管理
通用
·设置/获取参数
·下载设置文件
·驱动器错误处理
·I/O接口
2. 网络解决方案:
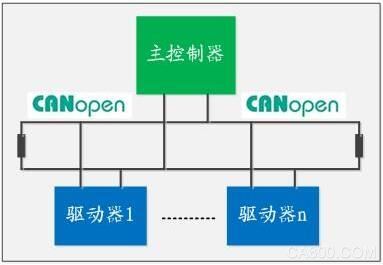
为CANopen网络,泰科智能提供了一个板载微控制器、双通道的PCI卡。该卡带CANView,可支持网络诊断、消息显示与总线负载分析。
泰科智能驱动器带完善的本地I/O特性,以减少第三方设备的需要。EtherCAT
PCB安装驱动模块也包含了一个高速SPI接口,以方便大量的I/O数量扩展。
泰科智能I/O处理器模块,带有72个数字I/O与12个模拟量输入,可以使OEM设计最优的系统接口,并将它们无缝的集成到控制系统中。
3. EtherCAT主控制器:
在一个带伺服闭环在驱动器中的分布式控制结构中,MLC与MLO使一个用户化的主机非常接近OEM。也可以有许多第三方的EtherCAT主控制器可用。这些产品主要用于完成软件的任务,要求一台带实时多任务操作系统的PC。
EtherCAT主控制器的供应商包括:
·Beckoff (TwinCAT)
·Acontis Technologies
·Soft Servo
·ACS Motion Control
·3S (CoDeSys)
·Koenig Process Automation
4. 从CANopen移植到EtherCAT:
CANopen对于分布式控制来说是一个已经被证实了的可靠而又低成本的解决方案,可以满足大多数应用需要。对于要求实时调整伺服环的集中式多轴间高度耦合控制,选择EtherCAT更合适。网络拓扑结构、节点数与线缆也是选择EtherCAT时考虑的因素。从CANopen移植到EtherCAT的优缺点,总结如下:
优点:
缺点:
·适合轴间高度耦合的集中式控制
·增加了驱动器成本
·灵活带冗余的线路拓扑
·增大了驱动器外形尺寸
·更长的通信距离(100m) ·驱动器在PCB布线时必须考虑信号传输线的影响
·理论上讲网络节点数无限制
·从轴到从轴之间高速通讯
·标准以太网接口,无需CAN卡