0 引言
传统的电源多为模拟控制,模拟控制技术已经相当成熟。模拟控制存在很多固有的缺点:①控制电路的元器件比较多,电路复杂,所占体积较大;②灵活性不够,硬件电路设计好了,控制策略就无法改变;③不便于调试,由于所采用器件特性的差异,致使电源的一致性较差,且模拟器件工作点的漂移导致系统参数的漂移。模拟方式很难采用一些先进的控制方法,所以电源的数字化控制是发展的趋势。
在UPS中,经常用Push-Pull电路实现charger的功能,用IC3525芯片实现升压控制功能。在Push-Pull控制中,IC3525的外围补偿电路较为麻烦,且在电池电压、市电、负载等外界条件变化时,会导致整机效率、Bus电压等的变化。
假如采用软件来实现IC3525的闭环控制功能,不仅使Bus电压具有更好的可移植性和可调性,还可望得到较高的整机效率及简单的Push-Pull升压电路。
1 IC3525的工作原理[1]
IC3525实现PWM输出脉宽调节的控制原理框图,如下图1所示。
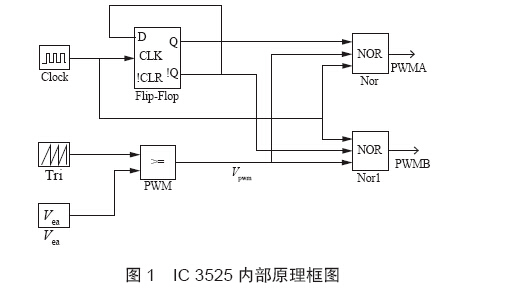
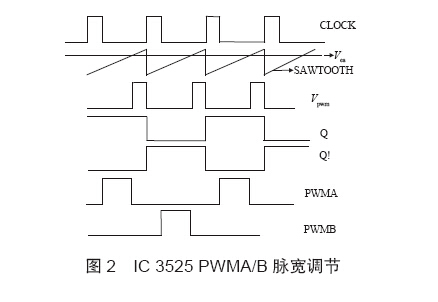
其中Vea为Bus经分压后与IC3525 PIN2的+5V基准电压比较,产生的误差放大信号。Vea与一幅值为5V、频率为100kHz的三角波比较后,输出Vpwm , Vpwm与IC3525内部100kHz的Clock、触发器的输出信号等同时经一个或非门,产生用于控制Push-Pull脉宽的PWMA、PWMB。其中Vpwm与Clock信号决定了PWMA、PWMB的死区时间,保证PWMA、PWMB不能同时为高电平。具体脉宽的调节见图2。
由图2可知,当Bus电压升高时,Vea变低,Vpwm脉宽变大,即死区时间变长,则PWMA、PWMB脉宽变窄,Bus电压回落。反之亦然。即系统能在由于各种外界条件变化(如瞬投负载、电池电压变化等)而引起Bus电压变化时进行调节,使其最终维持在设定的恒值上。
2 模型的建立[2]
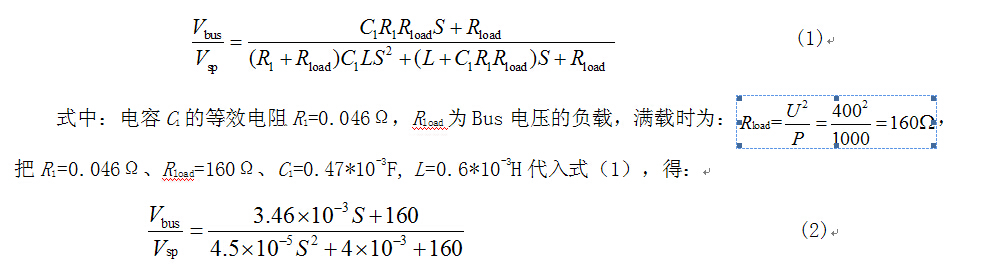
以某UPS的changer为实验载体,其IC 3525升压部分为一个闭环控制系统,见图3。其最终目的是保持Bus电压在不同条件下保持稳定,Bus电压的调整,可通过Bus电压的误差参考信号电位的调整来实现。误差参考电压给定后,闭环系统就可使Bus电压保持在设定值上。当负载或电池电压等变动(即存在系统扰动)引起Bus电压瞬间变化时,Bus的反馈电压相应变化,产生脉宽可调的Push-Pull信号。Bus升压的原理图如图3所示(死区产生电路从略):其中Vsp到VBus间为一由电容、电阻、电感组成的二阶系统,其传递函数可写成:
{$page$}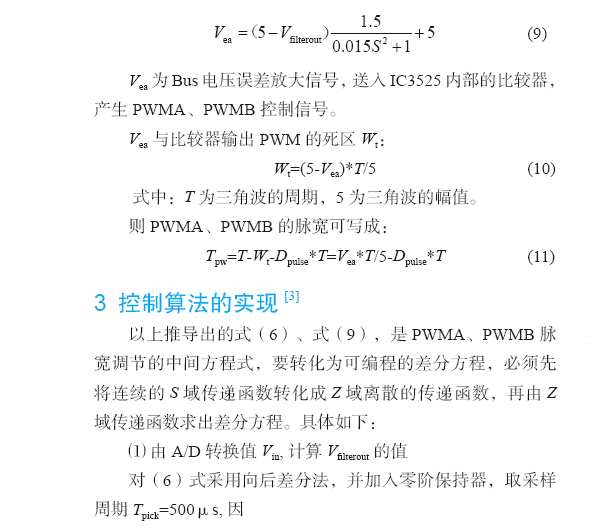

{$page$}
4 系统仿真[4] [5]
系统传递函数的阶次、增益等参数不同,系统的输出如调节时间、响应速度、超调量、稳定性等也将不同。所以,需要小心调整系统的各个参数,使系统在各种条件下都能满足要求。根据以上推导出的系统传递函数及Push-Pull电路,建立MATLAB仿真模型。
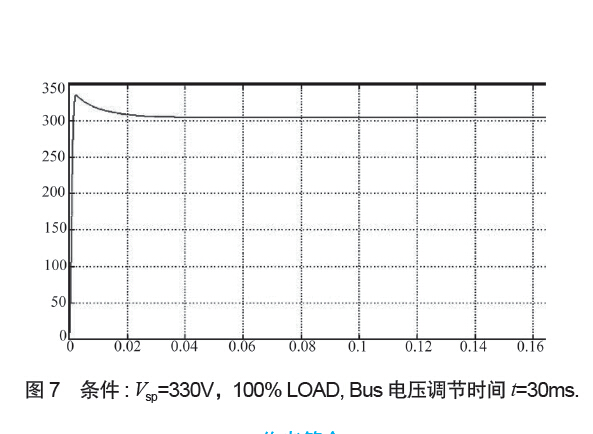
在Z域的仿真:因CPU对连续信号要进行采样处理,所以必须将上述连续系统离散化,如此CPU便能根据每次的采样值进行判断,达到控制的目的。离散时,不是直接将传递函数从S域变换到Z域即可,而是要加入采样器、保持器。这里涉及到两个问题:一是采样周期Tpick的选择,根据香农定理,如果连续输入信号e(t)具有有限带宽,且有直到wh(rad/s)的频率分量,则Tpick≤Π/wh时,采样信号便可大致描述输入的连续信号e(t),故可取Bus电压的采样周期Tpick=500μs。二是保持器的选择,其作用是解决各采样点间的插值问题,这里采用零阶保持器,它把前一采样时刻nT的采样值一直保持到下一采样时刻(n+1)T到来之前,即使采样信号变成阶梯信号,其传递函数 。确定了采样周期与保持器,便可对连续信号离散化。离散后的系统模型见图6,在与上述同样条件测得离散化后的Bus电压波形,见图7。
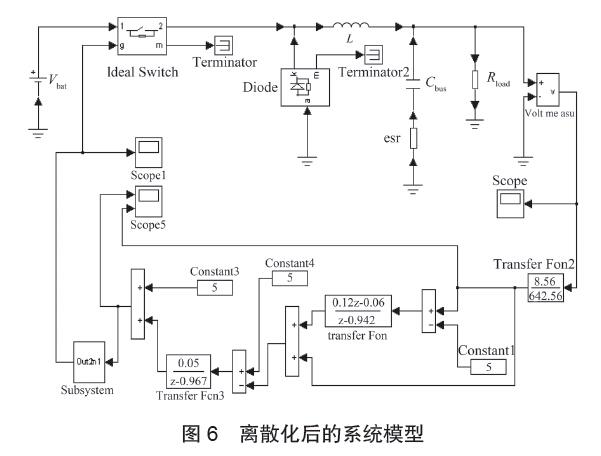
上图中电阻改为长方形,电容改为平行直线,电感改为曲折状,二极管中间通直线
5 结论
⑴ 由仿真的Bus电压波形可知,从仿真结果即Bus电压的稳定性、响应速度等方面看,系统符合要求,Push-Pull电路IC3525控制的数字化是可行的。
⑵ 由于仿真时所接的负载为纯阻性,且存在实际电路与理想模型间的差异,无法仿真出实际系统的诸多情况,如瞬态响应、对整机效率的影响等。具体参数需在实际系统中,通过调整软件参数来验证并修正。
参考文献
[1]Motorola, Inc. SG3525A data sheet Rev 2,1996.
[2]徐德鸿.电力电子系统建模及控制[M]. 第一版,北京,机械工业出版社,2006.
[3]于海生等.微型计算机控制技术[M].第二版,北京,清华大学出版社,2009.
[4]洪乃刚.电力电子和电力拖动控制系统的MATLAB仿真[M].第一版,北京,机械工业出版社,2005.
[5]胡寿松. 自动控制原理[M].第六版,北京,科学出版社,2013.
作者简介:
张常玉,1980年,男,硕士,任职于上海贝尔股份有限公司,研发工程师,主要研究方向为:通信高效率电源。
