【摘要】本文主要介绍了台达总线型运动控制器10MC的特点,并介绍了台达针对高速绕线机提供的解决方案。总线型运动控制器10MC适合在绕线机上应用,它不但能满足高速数据处理的要求,而且有很高的响应速度。
【Abstract】This article mainly introduces the characteristics of Delta’s bus Topology motion controller 10MC, and introduced Detla’s solution for high speed winding machine,it not only can satisfy the requirement of high speed data processing,also has high response speed.
【关键字】绕线机;电子凸轮
【Keywords】winding machine; Electronic CAM
顾名思义,绕线机就是把现状的物体缠绕到固定工件上的机器。主要以漆包线为主,广泛应用在各种电子类线圈行业;如继电器、各种微电机、电子变压器、电感线圈、高压点火线圈、空心线圈、磁石定子电机、充电铁芯等。
对于目前绕线机这个行业来说,有着很光明的前景,因为我们用到的相当多的电子产品都需要用到线圈,小到一个耳机,大到汽车电子,都离不开线圈这个必不可少的电子部件。随着对产品卓越性能的不断追求,对各个部件质量的要求也在不断提高,那就需要加工部件的机械加工出来的产品不但要符合应用上的标准,同时也要美观。
台达目前生产的总线型运动控制器10MC就很适合在绕线机上应用,它不但能满足高速数据处理的要求,而且有很高的响应速度,其主要特点如下:
内建高速总线(CANOPEN),可控制高达16实轴;
内部可构建虚轴以及外部编码器虚主轴(虚轴及外部编码器主轴范围为1~18,不可与实轴编号重复);
强大的现场网络支持(DeviceNet主从站,CanOpen主从站以及Profibus-DP从站),可组建功能复杂的控制系统;
支持众多的I/O扩展(左侧高速AIAO,右侧低速AIAO以及DIDO,温度模块等);
使用简单,功能完整,方便应用的软件界面;
提供标准的总线电缆,中断电阻等,配线简单,即插即用,无需用户自己加工。
1 绕线机台达方案
1.1系统架构
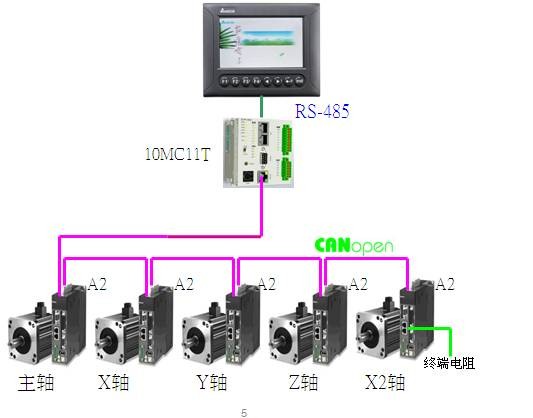
图1 系统架构图
1.2实物照以及产品照片

图2 绕线机实物照
图3 台达产品
1.3绕线功能实现
在绕线功能的实现中,首先要能准确的计算出每一层需要绕线的圈数,不同的骨架,对应的绕线圈数也不同;其次要保证在绕线的过程中让机器能暂停,重启之后在原来的基础上继续运行;最后,要保证绕出来的线圈的美观性以及线圈表面的平整度。
在这个系统当中,绕线功能是通过10MC强大的电子凸轮来实现的,为保证绕线的精度以及稳定性,通过10MC内建虚轴的功能,让两个绕线轴依照凸轮表的关系,跟随虚主轴动作,这样能在很大程度上降低系统误差。
假设:骨架长度为L、漆包线线径为R、每层绕线圈数为N,则N=L/R。
凸轮曲线如图4和图5所示。

图4 绕线轴凸轮表

图5 旋转轴凸轮表
根据以上凸轮表的关系,在10MC电子凸轮关系指令(MC_CanIn)中填入已经计算好的主轴放大倍率(MasterScaling)和从轴放大倍率(SlaveScaling),可以轻松实现绕线功能,相应MC运动程序如下图。
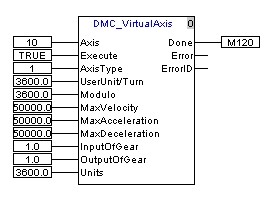
图6 虚轴的建立
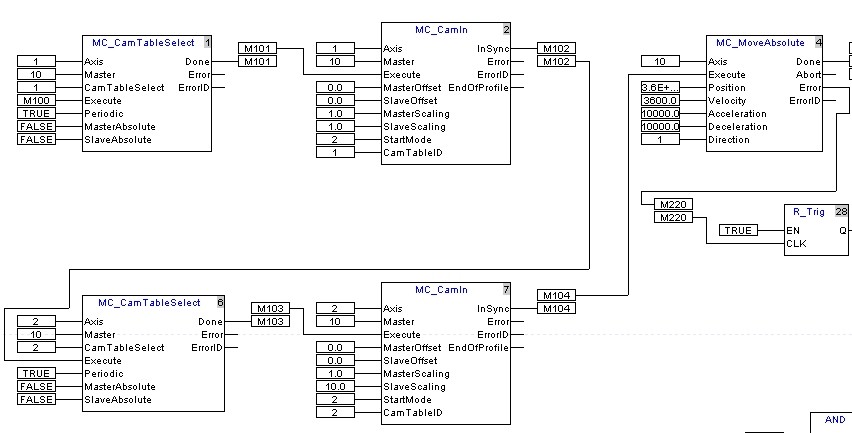
图7 绕线功能的MC运动程序
绕线过程中的暂停以及重启,可以通过绝对位移指令(MC_MoveAbsolute),停止指令(MC_Stop)以及使能指令(MC_Power)来轻松实现,相应MC运动程序如下图所示:
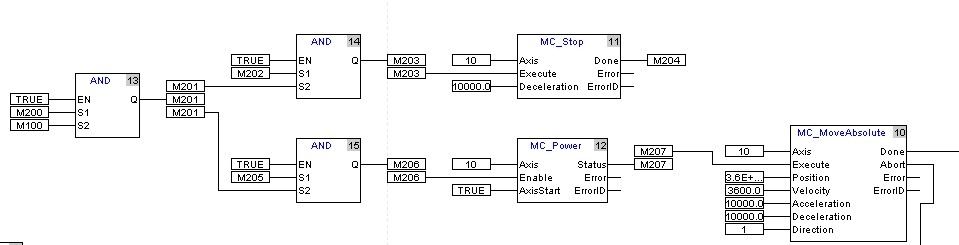
图8 绕线过程中暂停和重启的MC运动程序
暂停时,使用MC_Stop,使建立的虚主轴停止运行,那么跟它建立了凸轮关系的两个绕线的从轴也将停止运行。
启动时,使用MC_Power使能伺服驱动器,然后再用它的完成未去使能绝对位移指令,那么伺服会从暂停的位置开始,重新跑完未完成的距离。
1.4缠脚功能的实现
在绕线开始时和绕线结束后,要把漆包线缠绕在相应骨架的Pin脚上,那么就需要进行缠脚的动作,此功能也是通过电子凸轮来实现,首先建立一个虚轴,让这个虚轴作为主轴,以X,Y,Z三个实轴作为从轴,从轴与主轴之间通过凸轮表建立相应关系,主轴运动时,从轴跟随主轴做相关动作。
缠脚的模式分为两种,一种是以Z轴为缠绕轴,以X,Y轴作为平面轴进行缠脚;一种是以X轴作为缠绕轴,以Y,Z轴作为平面轴进行缠脚,缠脚的框图如图9所示。
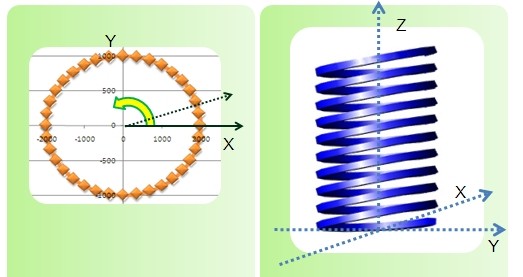
图9 缠脚框图
当以Z轴作为缠绕轴,以X、Y轴作为平面轴时,各个轴相对应的凸轮曲线如图10、图11以及图12所示。

图10 Z轴凸轮曲线

图11 X轴凸轮曲线

图12 Y轴凸轮曲线
当以X轴作为缠绕轴,以Y、Z轴作为平面轴时,各个轴相对应的凸轮曲线如下图所示。

图13 X轴凸轮曲线

图14 Z轴凸轮曲线

图15 Y轴凸轮曲线
缠脚动作对应的MC程序如下所示:
虚轴建立之后,让其进行绝对位移,各从轴会跟随这个虚轴进行运动。
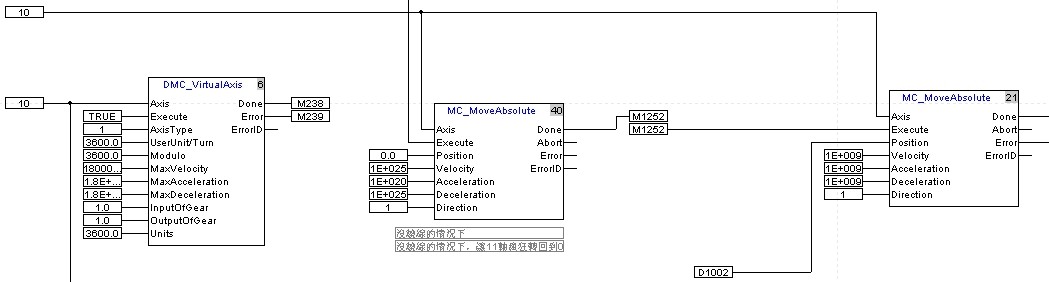
图16 缠脚动作MC程序
在虚轴建立完成之后,开始进行缠脚时,各从轴要和虚轴建立凸轮关系,这部分的执行就是通过图17中的程序来完成。
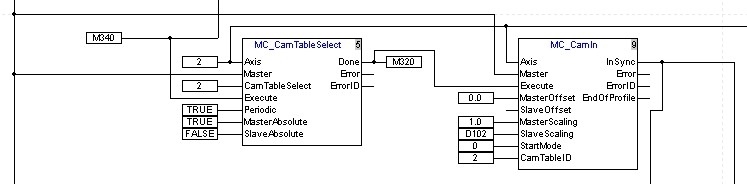
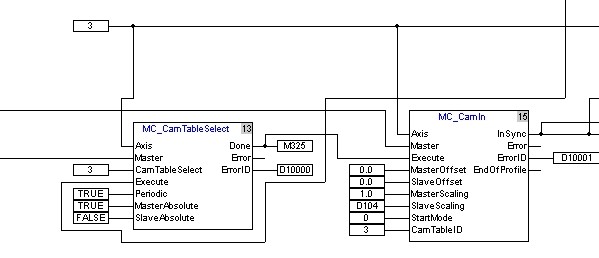
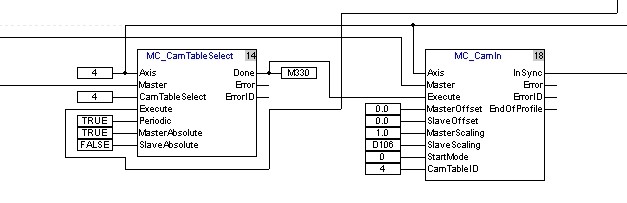
图17 从轴和虚轴建立凸轮关系执行程序
缠脚的第二种方式在程序上的实现,与上面的程序类似,只是将轴号稍做修改,这里就不再重复说明了。
2 总结
在绕线机行业里面,采用的Solution主要是以YASKAWA,MITSUBISHI等厂家的为主,相信在以后的发展中,台达的Solution在这个行业里面也会有其一片广阔的天空。
作者简介:
张兵辉,男,毕业于兰州大学电子信息科学与技术专业,现任中达电子应用技术中心专案工程师,具有丰富的专案开发经验,为客户提供优质的自动化解决方案。
