Abstract: On account of parameter of UAV airframe change acuteness during flight course, focuses on certain model UAV, an application of Fuzzy-PID in UAV pitch control is presented after analyzing the UAV longitudinal dynamic model. The method combines PID control with fuzzy control. The accuracy is ensured by PID controller and the dynamic speed is improved by fuzzy controller. Furthemore, according to flight control problem in fact, the different fuzzy control charts are applied, it enhance the control ability and simplify the design procedure. The validity is verified by simulation. Therefore, the control method based on Fuzzy-PID can be widely applied in UAV flight control.
Key words: UAV; fuzzy control; flight control; PID
1 引言
近年来,随着无人机机载任务管理系统技术的进步和稳定性的提高,无人机越来越多的应用到实际工作当中。现在无人机主要是用于侦察,边防安全,执行战斗任务等。此外,一些新的应用领域也正在被开拓,比如美军正在研制的无人战斗机,城市道路交通安全,城市追捕,人员搜救等[1]。无人机在执行所有这些任务当中,都必须要求无人机具有较高的精确度,容错和故障诊断能力,以及较好的可操纵性。为了实现期望的完美性能指标,就必须要求无人机具有较精确的飞行控制系统来实现对其自身的控制。目前无人机的先进控制方法有很多,但大多都还停留在理论研究阶段,而且控制器的设计复杂,很难应用到工程实际之中。本文针对传统的PID控制器精度高,但需要精确的数学模型,模糊控制不要求控制对象的精确数学模型,因而灵活,适应性强。可是,任何一种纯模糊控制器本质上是一种非线性PD控制,不具备积分作用,控制过程会出现不平衡现象,稳态误差也较难减至理想程度[2,3]。而模糊-PID符合型控制器兼顾了上述两种方法的优点,可以很好的实现对无人机的控制。
2 无人机纵向动力学模型分析
在进行控制系统设计之前,首先应当对纵向飞行特性进行分析。为此目的,如公式1所示的纵向运动学方程[4,5,6,7]被用于本文的分析,前两个方程是X和Z轴的力学方程,M是Y轴的力矩方程
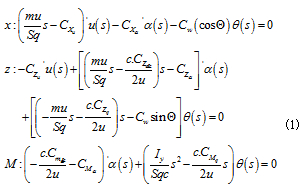
其中是纵向飞行速度变化量,是纵向的迎角变化量,是俯仰角,是俯仰角变化量,因此,,这里u是X轴的速度分量,w是Z轴的速度分量,是纵向的稳定飞行速度。
在介绍了运动学方程之后,无人机的典型特性分别入表1,表2,表3所示:
表1 无人机的典型特性
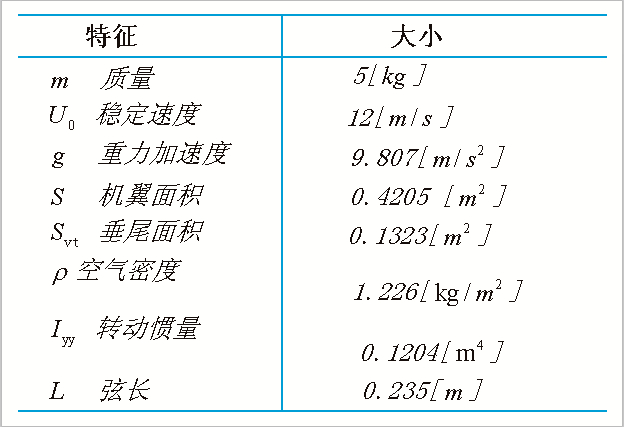
表2 无人机的气动参数
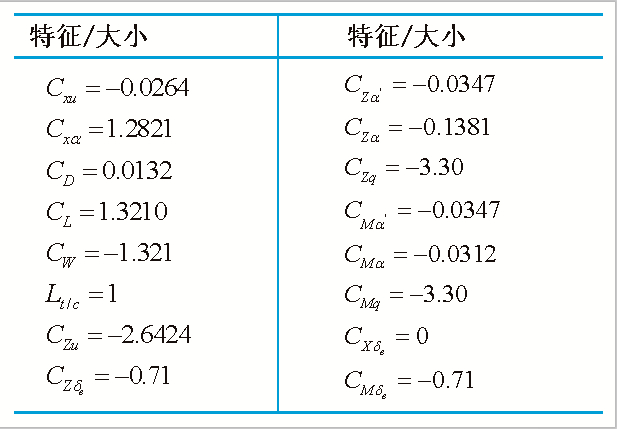
表3 纵向飞行特性
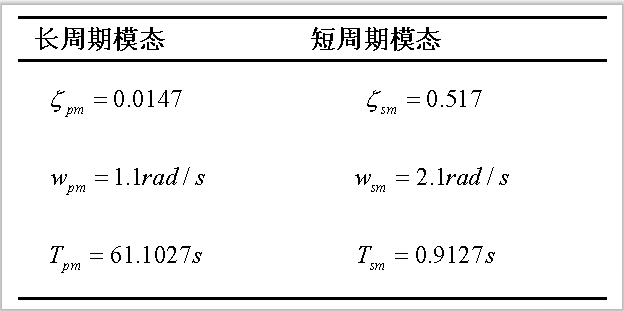
从长周期模态和短周期模态中,我们可以看出,无人机在长周期模态阻尼比较小,在短周期模态具有较好的阻尼比。图1,图2分别是无人机纵向动力学的长周期频域和时域响应,从图中可以看出,升降舵有较大给定时对长周期模态()会产生较大影响。
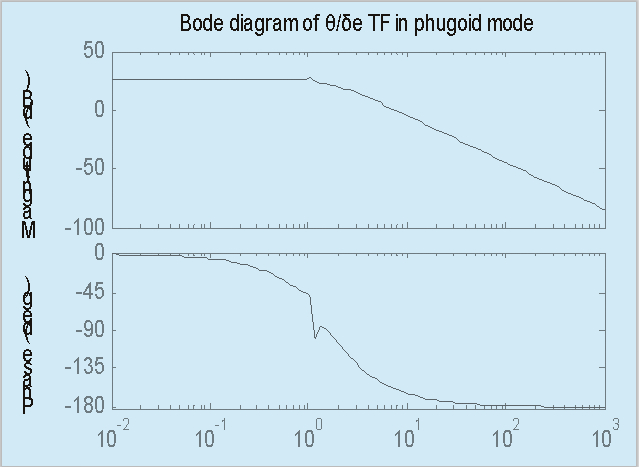
图1 传递函数的频域响应曲线
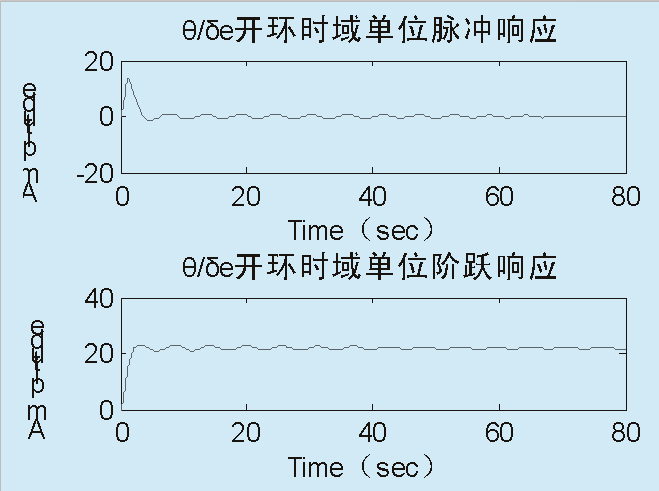
图2 传递函数的时域响应曲线
3 基于模糊-PID的无人机姿态控制
1) 控制原理分析
对于无人机控制系统要想只采用传统的PID控制方法就取得较好的控制效果是比较困难的。模糊控制较强的灵活性和适应性却可以弥补传统PID控制此方面的不足。然而,模糊控制存折的控制精度不高及过程不平滑又可以通过PID控制解决。因此将传统的PID控制器与模糊控制器相结合的混合型Fuzzy-PID控制方法无疑可以取得比传统PID控制或单一的模糊控制更好的控制效果。如图3所示,本文提出的Fuzzy-PID控制器[8,9,10]由一个模糊控制器和一个PID控制器组成,主要实现对无人机俯仰通道的姿态控制。
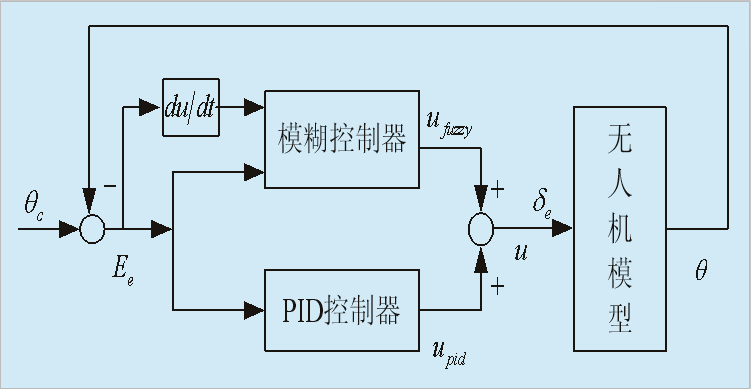
图3 控制器结构
其中表示给定输入,表示误差输出,和分别表示模糊控制器和PID控制器的输出;u表示控制器的总输出;PID控制器的输出时总输出的总体,模糊控制的输出则是在PID控制输出的基础上做相应地调整。例如,在误差较大,误差变化率较小的时候,模糊控制器会适当的增大输出量的绝对值,从而起到加快响应速度,减小调节时间的作用。当误差较小,误差变化率较大时,模糊控制器则会适当减小输出量的绝对值,从而防止超调并且减小稳态误差[11]。
2) PID控制器的设计

式中三个参数决定了整个控制器的控制效果,控制器的设计最重要的也就是这三个参数的选择,由于模糊控制中已考虑了误差的变化率,所以PID控制器中没有选用微分环节[12]。
3) 模糊控制器的设计[13,14]
本文所采用的模糊控制器是通用的二维模糊控制器。考虑实时性和精度的要求,模糊控制器的结构没有采用单一模糊控制表。因为如果使用单一的控制表就要把论域分的过细,控制表过于复杂,设计起来也就更加麻烦。例如,当误差变化量为和两种情况时,在误差为小角度范围内产生的影响的差别还是比较大的,但在误差为大角度范围内分别产生的影响几乎是相同的。所以,本文的模糊控制器针对误差处于不同的区域(小,中,大)选取不同的模糊控制表来计算输出,从而简化设计过程。
① 输入量和输出量的模糊化 这里以小角度进行控制为例来说明输入量和输出量的模糊化过程。
表示在小角度范围内,经过上次调整后的无人机俯仰角与期望俯仰角之间的差距,把的论域分为5级:,,,,,分别对应0,1,2,3,4。再将论域用模糊语言分为3档描述:大(B)、中(M)、小(S),其对应3个模糊集合,然后隶属度联系它们。表示在小角度范围内,调整后的无人机俯仰角与目标俯仰角之间的差距的变化率。的论域分为7级:,,,,,,。再用7档模糊语言来描述,并通过隶属度联系它们。对于误差为小角度情况下的输出量,则是将其论域分为了8级:。中等角度范围和大角度范围的输出和输入量的模糊化方式与此类似,只是论域划分不同。
② 模糊推理规则[15] 模糊控制器的规则是基于专家知识或控制工程师长期积累的经验。其一般形式是由模糊语言和模糊逻辑组成的模糊条件语句。模糊控制器的推理基本原则是:当误差大,误差变化率也大时,控制器的输出为零或较小使误差尽快减小;当误差大,误差变化率小时,控制器输出较大的正值来加快调节速度;当误差小,误差变化率大时,控制器输出较大的负值以防止超调;当误差小,误差变化率也小时,控制器的输出为零或较小的正值以保证稳态精度。其基本形式如下:
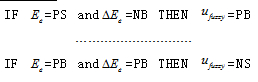
根据推理规则就可以求出模糊关系矩阵。
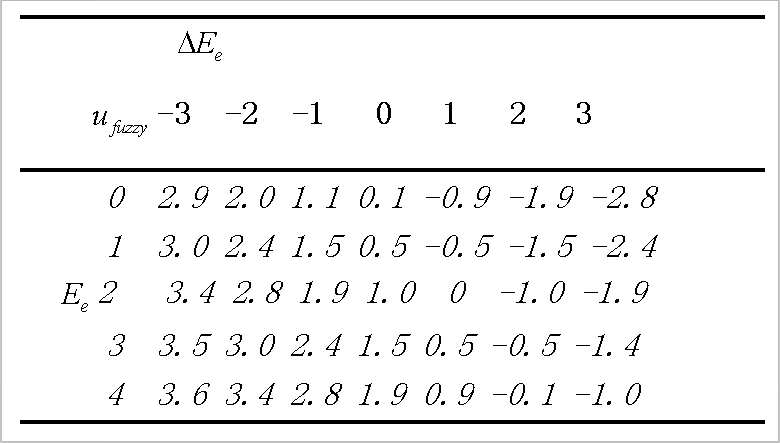
③ 模糊决策 为了较全面地反应推理信息,模糊判决采用重心法得到模糊决策表。对应小角度误差的模糊决策表见表4,其他范围误差的决策表与此类似。
表4 模糊决策表
4) 输出量的合成 从上述控制器的设计方法中不难得出俯仰角控制的总输出为:

符号函数由参数调整知识库根据实际误差和误差变化情况确定。
4 仿真验证
在俯仰通道控制中单一的PID控制与Fuzzy-PID控制效果比较情况如图4所示。
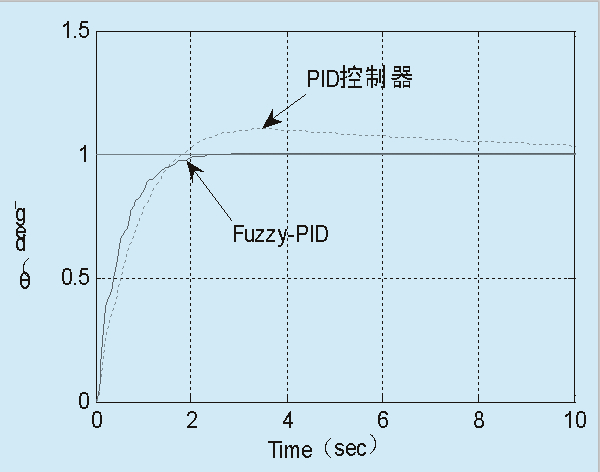
图4 俯仰角控制比较
从图中可以看出,采用与误差区域对应的Kp,Ki值的单一PID控制保证了一定的快速性,但也存在静态误差。加入了模糊控制器后,输出量在条件的起始和中间阶段变化不大,从而保证了原有的快速性。但在调节过程的末端,模糊控制器输出的负值,减小了整个控制器的输出,降低了超调,保证了控制精度。
通常高度保持 模式中只采用高度反馈信号不能使系统稳定工作,因此本文采用在反馈通道中同时采用了h和升降速度作为反馈信号,其设计原理如图5所示。
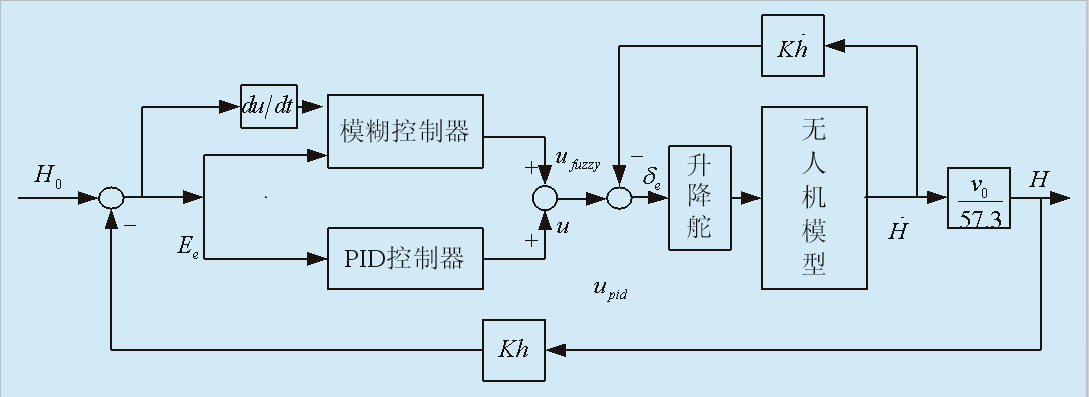
图5 高度保持模式原理图
图6为按照图5的原理图建立的仿真模型,并进行仿真得到的轨迹响应曲线,从响应曲线可以看出,所设计的模糊-PID自动飞行控制系统能够很好的实现对无人机下滑轨迹的控制作用,取得了非常好的控制效果。
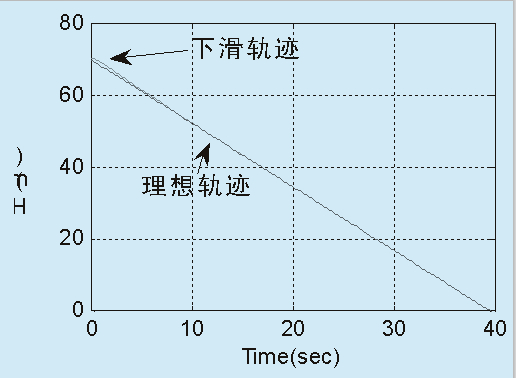
图6 下滑轨迹响应曲线
5 结束语
仿真表明,本文所提出的模糊-PID控制方法弥补了单一的PID控制器在无人机纵向通道控制中存在的不足,既保证了无人机纵向控制的准确性和稳定性,又缩短了动态调整时间,取得了较好的控制效果。设计中采用分区选择模糊控制表的方法简化了控制器的设计。该方法同样可以用于无人机横侧向控制中,实现对无人机滚转通道的控制。
参考文献:
[1] P.FABIANI,V.FUERTES,A.PIQUEREAU,R.MAMPEY and F.TEICHTEIL-KONIGSBUCH,“Au-tono mous Flight and Navigation of Vtol uavs:From Autonomy Demonstrations to out-of-sight Flights”[J].in aerospace science and technology,2007,11(2-3):183-193.
[2] 彭刚.基于模糊推理的交流伺服控制器参数自调整研究[D],武汉:华中理工大学,1998.
[3] 陶永华等.新型PID控制及应用[M].北京:机械工业出版社,2002.
[4] J.H.Blakelock,Automatic Control of Aircrafts and Missiles[J].Wiley,1991.
[5] P.FABIANI,V.FUERTES,A.PIQUEREAU,R.M-AMPEY and F.TEICHTEIL KONIGSBUCH,“Autonomous flight and navigation of VTOL UAVs:fromautonomy demonstrations to out-of-sight flights”[J].in Aerospace Scienceand Technology,2007,11(2-3):183-193.
[6] D.E.KIRK,Optimal Control Theory:An Introduction,2nd editions,Dover Publications[C].2007.
[7] J.S.ARORA,Introduction to Optimum Design,Academic Press;2ndedition[C].2004.
[8] K.TURKOGLU,Investigation the Modes of Hezarfen UAV and Automatic Control Systems’Design[J].bsc Thesis,
Istanbul Technical University,Istanbul,Turkey.2007.
[9] DEMETRIO TURRA,LORENZO POLLINI,Marioinno-centi,Moving Waypoint-based Fuzzy Gu-idance for Unmanned Aircraft[J].AIAA Guidance,Navigation,and Control Con-ference and Exhibit,2003,(8):11-14.
[10] MENON,P.and IRAGAVARAPU,V,Blended Hom-ing Guidance Law Using Fuzzy Logic[C].AIAA Guidance Navigation and Con-trol Conference Boston,MA,August 1998.
[11] F.,|b.,L.,P.,and M.,I.,Waypoint-based Fuzzy Guidance for Unmanned Aircraft a NewApproach[C].ProceedingsAIAA,Guidance,Navigation an Control Conferece, Mon-terey,CA,2002.
[12] Wei cHANG,Application of fuzzy control method on the longitudinal flight cont-rol design of a ucav[d],National che-ng kung university,2010:50-58.
[13] Ding lIDONG,lu yUPING,Study of longitudinal flight control law of a flying wing ucav during landing,[j].Computer Measurement & Control,2007,7(2).
[14] 高健,黄心汉,彭刚,杨其宇,杨涛,基于Fuzzy-PID的移动机器人运动控制[J].控制工程,2004,11(6).
[15] 章卫国,杨向忠著.模糊控制理论与应用[M].西安:西北工业大学出版社,1999:88-104.